Квантовый ликбез - 19. Базисные состояния и измерительный базис
Предыдущие посты
Взглянем ещё раз на эксперимент, с которого мы начали часть 16 (рисунок 19.1).
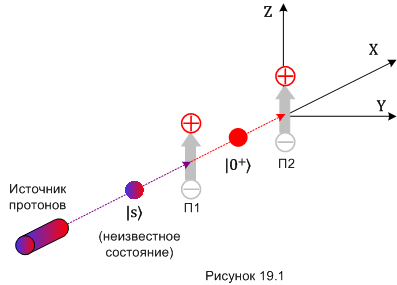
Напомню: первый прибор П1 предназначен для подготовки частиц со спином |0+〉. Потом частицы в этом состоянии мы запускаем в прибор П2, с ориентацией {0} (собственное направление прибора совпадает с направлением координатной оси Z). После достаточно длинной серии попыток, мы понимаем, что результат такого измерения однозначно предопределён: все частицы попадут в плюс-датчик.
А что будет, если частицы в состоянии |0+〉 мы запустим в прибор, повёрнутый на некоторый угол α вокруг, например, оси X (рисунок 19.2)?
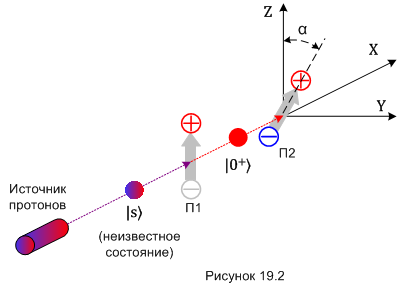
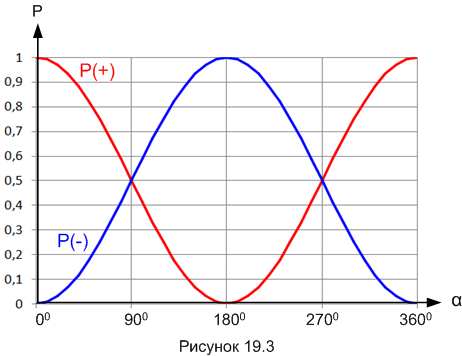
Если говорить на квантовом «жаргоне», то мы поменяли измерительный базис. Теперь мы измеряем момент импульса частицы не относительно оси Z, а относительно другого направления. Былая определённость пропадает: при такой конфигурации эксперимента часть попыток будет приводить к срабатыванию минус-датчика. «Отстреляв» серии частиц при разных углах поворота, можно выяснить, как вероятность получить тот или иной результат зависят от угла α. Графики этих зависимостей показаны на рисунке 19.3.
Для порядка напишем также формулы этих зависимостей:
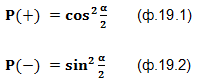
Заметим, что наибольшая неопределённость результата, кода вероятности попадания в плюс-датчик и минус-датчик равны, наблюдается при повороте прибора на 90° и 270°. При повороте на 180° неопределённость опять исчезает, теперь любая попытка заканчивается срабатыванием минус-датчика.
Аналогичные результаты мы получим, если будем вращать прибор вокруг оси Y. То же самое будет при комбинированном повороте вокруг осей X и Y. То есть, любое отклонение собственного направления прибора от оси Z приводит к появлению большей или меньшей (в зависимости от угла, на который собственное направление прибора отклонено от оси Z) неопределённости результата измерения.
Эти результаты показывают, что для частицы в состоянии |0+〉 направление вдоль оси Z является особым: только при таком направлении прибора результат измерения предопределён. Хочется даже сказать, что спин частицы направлен вдоль оси Z. Обычно так и говорят: «спин вверх» или «спин вниз». Но это не совсем точно. Спин, как мы уже знаем, это совокупность всевозможных виртуальных вращений (моментов импульса) частицы. Поэтому он не может быть направлен «вверх» или «вниз» или вообще в какую бы то ни было сторону. Другое дело, что амплитуды вероятности различных виртуальных вращений могут быть различными. В частности, когда мы измеряем момент импульса частицы в состоянии |0+〉 прибором в ориентации {0}, амплитуда вероятности получить плюс-результат равна единице, а амплитуда вероятности получить минус-результат равна нулю. Для любых других измерительных базисов амплитуды вероятности отличаются от нуля и единицы, поэтому определённости измерений нет. Только в этом смысле направление прибора Z для состояния |0+〉 является особым. И только в этом смысле следует понимать выражение «спин вверх».
И ещё одно замечание: на самом деле направлений «полной определённости» два: то, о котором мы только что рассуждали, и противоположное ему. В разбираемом случае это ориентации прибора {0} и {180} (последнее означает, что прибор повёрнут относительно положительного направления оси Z на 180°). На будущее условимся считать особым одно «положительное» направление, в смысле такое, когда срабатывает только плюс-датчик прибора.
Пока мы экспериментировали с частицами в состоянии |0+〉 - "спин вверх". А что будет, если мы поизмеряем в повёрнутых базисах другие состояния? Проделаем следующий эксперимент (рисунок 19.4).
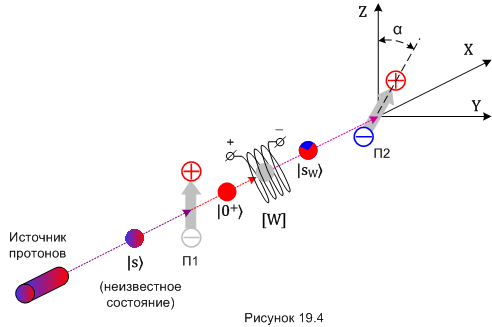
Все эти устройства нам уже знакомы по части 16. Генерируем частицу в состоянии |0+〉. После этого дозированным воздействием [W] приводим её в любое желаемое состояние |SW〉 вида:

Затем проводим серии измерений момента импульса при разных ориентациях прибора П2. В результате этого эксперимента мы выясним, что для любого состояния |SW〉 существует своё особое направление прибора П2. Такое, при котором результат измерения однозначно предопределён. Неопределённость возникает при отклонении прибора от этого направления. Зависимости вероятностей срабатывания плюс-датчика или минус-датчика от угла между особым направлением частицы и собственным направлением прибора такие же, как на рисунке 19.4 и описываются формулами (ф. 19.1), (ф. 19.2).
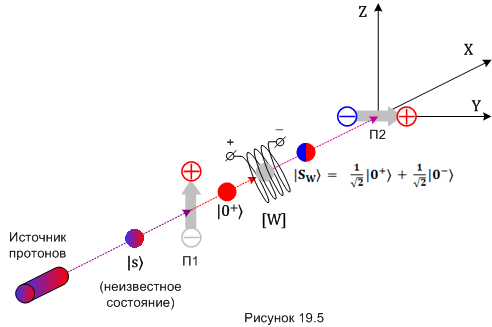
Посмотрим конкретный пример. Допустим, мы измеряем прибором П2 момент импульса частицы в состоянии:

Для этого состояния полную определённость измерений гарантирует прибор, повёрнутый относительно исходного положения на 90 градусов вокруг оси X по часовой стрелке, обозначим такую ориентацию прибора как {90X}. То есть, особое направление для состояния, выраженное формулой (ф. 19.4) совпадает с направлением оси Y. Можете называть такое состояние «спин вправо», если вам так удобнее. Для окончательной ясности изобразим всё сказанное на рисунке 19.5.
Итогом всех этих разговоров будет следующее утверждение: для любого чистого состояния можно подобрать измерительный базис, гарантирующий полную определённость измерения. Можно также это утверждение «перевернуть» и считать его предварительным определением чистого состояния. Дело в том, что для смешанных (не чистых) состояний измерительных базисов, гарантирующих полную определённость измерения, не существует.
Теперь ещё хотелось бы пояснить тонкую разницу между понятиями «измерительный базис» и «базисные состояния». Взгляните ещё раз на формулу (ф.19.4). Квантовое состояние |S〉 мы выразили как суперпозицию двух базисных состояний |0+〉 и |0-〉, то есть, двух реализуемых групп виртуальных вариантов, дающих однозначные результаты измерения на приборе с ориентацией {0}. Но, как уже говорилось, в выборе базисных состояний мы совершенно свободны. Например, в качестве базисных могут быть выбраны состояния, полностью определённые для прибора с ориентацией {90X}. Обозначим такие состояния как
и
. Тогда формулу (ф.19.4) можно переписать в следующем виде:

В таком представлении состояние |S〉 содержит только одну реализуемую группу виртуальных вариантов.
Объединим обе формулы (ф.19.4), (ф.19.5) и получим:

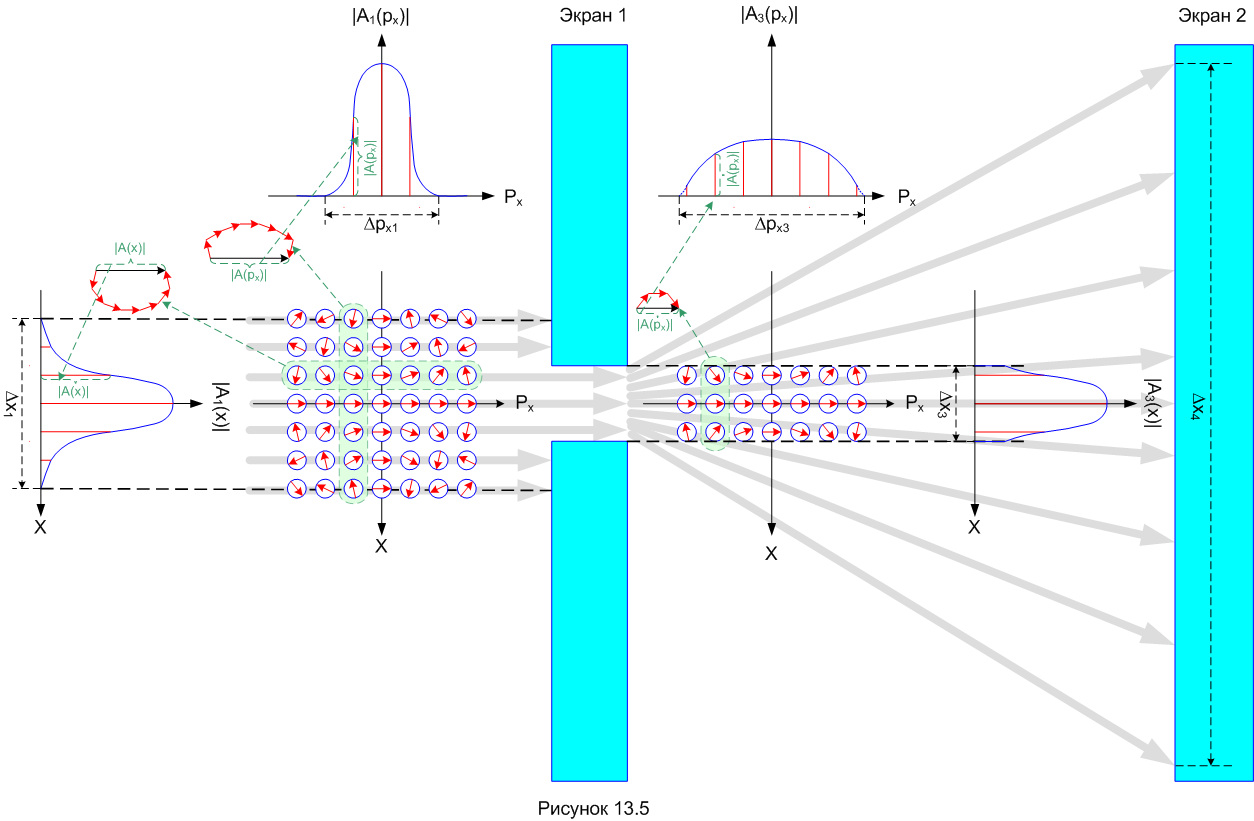
Как это всё трактовать физически? Формулы (ф.19.4), (ф.19.5) - это просто два разных способа группировки одного и того же множества виртуальных вариантов. Мы уже встречались с подобным раньше, смотрите, например, рисунок 13.5 . Там мы группировали виртуальные варианты по разным наблюдаемым физическим величинам: по значениям координат или по значениям импульсов.
Здесь тот же принцип. В формуле (ф.19.4) виртуальные варианты сгруппированы по значениям проекции момента импульса на ось Z. В формуле (ф.19.5) - по значениям проекции момента импульса на ось Y. Проекции момента импульса на разные направления - это, вообще говоря, разные физические величины. В том же смысле, как разными физическими величинами являются, например, координаты X, Y, Z, описывающие положение частицы в пространстве. То есть, выбор базисных состояний - это просто выбор способа представления одного и того же квантового состояния. Или, что то же самое, выбор способа группировки виртуальных вариантов. Так что у нас тут имеется произвол «в пределах разумного»: мы можем использовать любой физически осмысленный набор базисных состояний и выбирать тот, который наиболее удобен для расчётов в каждом конкретном случае. «В пределах разумного» означает, что:
а) группировка должна осуществляться по значениям каких-либо наблюдаемых (классических) физических величин;
б) получившийся набор базисных состояний должен быть полным, то есть, достаточным для представления любого квантового состояния.
Для прояснения опять приведу аналогию с координатами. Для точного представления любого мыслимого положения и движения материальной точки в пространстве нам необходимо три "базисных" координаты, например, X, Y, Z. Набор из двух "базисных" координат будет уже не полным. Но мы вольны в выборе системы координат. В этом смысле у нас в распоряжении бесконечное количество возможных координатных "базисов", выбирай тот, который удобнее.
Как правило (но не всегда) резонно использовать базисные состояния, логически привязанные к конкретным способам измерения, то есть, к физическим возможностям измерительного базиса. Скажем, прибор в ориентации {0} способен "выловить" из всего множества виртуальных вариантов только те, для которых проекция момента импульса на направление Z равна либо
, либо
(см. часть 14). Группы таких виртуальных вариантов мы обозначили как |0+〉 и |0-〉. Эти и только эти виртуальные варианты являются реализуемыми в измерительном базисе {0}. Значит, именно эти группы удобно использовать в качестве базисных состояний (ф.19.3). А рассматривая два или больше измерительных базиса, как мы это сделали, обсуждая опыт с рисунка 19.5, можно перейти к другим базисным состояниям, реализуемым в новом базисе (ф.19.5). Или можно одновременно использовать оба набора базисных состояний, корректно соотнося их друг с другом (ф.19.6).
Начиная с части 16 и до этого места мы оперировали с квантовыми состояниями одиночных частиц. В следующей части мы поговорим о квантовых состояниях систем, включающих две частицы и более.
Продолжение
Взглянем ещё раз на эксперимент, с которого мы начали часть 16 (рисунок 19.1).
Напомню: первый прибор П1 предназначен для подготовки частиц со спином |0+〉. Потом частицы в этом состоянии мы запускаем в прибор П2, с ориентацией {0} (собственное направление прибора совпадает с направлением координатной оси Z). После достаточно длинной серии попыток, мы понимаем, что результат такого измерения однозначно предопределён: все частицы попадут в плюс-датчик.
А что будет, если частицы в состоянии |0+〉 мы запустим в прибор, повёрнутый на некоторый угол α вокруг, например, оси X (рисунок 19.2)?
Если говорить на квантовом «жаргоне», то мы поменяли измерительный базис. Теперь мы измеряем момент импульса частицы не относительно оси Z, а относительно другого направления. Былая определённость пропадает: при такой конфигурации эксперимента часть попыток будет приводить к срабатыванию минус-датчика. «Отстреляв» серии частиц при разных углах поворота, можно выяснить, как вероятность получить тот или иной результат зависят от угла α. Графики этих зависимостей показаны на рисунке 19.3.
Для порядка напишем также формулы этих зависимостей:
Заметим, что наибольшая неопределённость результата, кода вероятности попадания в плюс-датчик и минус-датчик равны, наблюдается при повороте прибора на 90° и 270°. При повороте на 180° неопределённость опять исчезает, теперь любая попытка заканчивается срабатыванием минус-датчика.
Аналогичные результаты мы получим, если будем вращать прибор вокруг оси Y. То же самое будет при комбинированном повороте вокруг осей X и Y. То есть, любое отклонение собственного направления прибора от оси Z приводит к появлению большей или меньшей (в зависимости от угла, на который собственное направление прибора отклонено от оси Z) неопределённости результата измерения.
Эти результаты показывают, что для частицы в состоянии |0+〉 направление вдоль оси Z является особым: только при таком направлении прибора результат измерения предопределён. Хочется даже сказать, что спин частицы направлен вдоль оси Z. Обычно так и говорят: «спин вверх» или «спин вниз». Но это не совсем точно. Спин, как мы уже знаем, это совокупность всевозможных виртуальных вращений (моментов импульса) частицы. Поэтому он не может быть направлен «вверх» или «вниз» или вообще в какую бы то ни было сторону. Другое дело, что амплитуды вероятности различных виртуальных вращений могут быть различными. В частности, когда мы измеряем момент импульса частицы в состоянии |0+〉 прибором в ориентации {0}, амплитуда вероятности получить плюс-результат равна единице, а амплитуда вероятности получить минус-результат равна нулю. Для любых других измерительных базисов амплитуды вероятности отличаются от нуля и единицы, поэтому определённости измерений нет. Только в этом смысле направление прибора Z для состояния |0+〉 является особым. И только в этом смысле следует понимать выражение «спин вверх».
И ещё одно замечание: на самом деле направлений «полной определённости» два: то, о котором мы только что рассуждали, и противоположное ему. В разбираемом случае это ориентации прибора {0} и {180} (последнее означает, что прибор повёрнут относительно положительного направления оси Z на 180°). На будущее условимся считать особым одно «положительное» направление, в смысле такое, когда срабатывает только плюс-датчик прибора.
Пока мы экспериментировали с частицами в состоянии |0+〉 - "спин вверх". А что будет, если мы поизмеряем в повёрнутых базисах другие состояния? Проделаем следующий эксперимент (рисунок 19.4).
Все эти устройства нам уже знакомы по части 16. Генерируем частицу в состоянии |0+〉. После этого дозированным воздействием [W] приводим её в любое желаемое состояние |SW〉 вида:
Затем проводим серии измерений момента импульса при разных ориентациях прибора П2. В результате этого эксперимента мы выясним, что для любого состояния |SW〉 существует своё особое направление прибора П2. Такое, при котором результат измерения однозначно предопределён. Неопределённость возникает при отклонении прибора от этого направления. Зависимости вероятностей срабатывания плюс-датчика или минус-датчика от угла между особым направлением частицы и собственным направлением прибора такие же, как на рисунке 19.4 и описываются формулами (ф. 19.1), (ф. 19.2).
Посмотрим конкретный пример. Допустим, мы измеряем прибором П2 момент импульса частицы в состоянии:
Для этого состояния полную определённость измерений гарантирует прибор, повёрнутый относительно исходного положения на 90 градусов вокруг оси X по часовой стрелке, обозначим такую ориентацию прибора как {90X}. То есть, особое направление для состояния, выраженное формулой (ф. 19.4) совпадает с направлением оси Y. Можете называть такое состояние «спин вправо», если вам так удобнее. Для окончательной ясности изобразим всё сказанное на рисунке 19.5.
Итогом всех этих разговоров будет следующее утверждение: для любого чистого состояния можно подобрать измерительный базис, гарантирующий полную определённость измерения. Можно также это утверждение «перевернуть» и считать его предварительным определением чистого состояния. Дело в том, что для смешанных (не чистых) состояний измерительных базисов, гарантирующих полную определённость измерения, не существует.
Теперь ещё хотелось бы пояснить тонкую разницу между понятиями «измерительный базис» и «базисные состояния». Взгляните ещё раз на формулу (ф.19.4). Квантовое состояние |S〉 мы выразили как суперпозицию двух базисных состояний |0+〉 и |0-〉, то есть, двух реализуемых групп виртуальных вариантов, дающих однозначные результаты измерения на приборе с ориентацией {0}. Но, как уже говорилось, в выборе базисных состояний мы совершенно свободны. Например, в качестве базисных могут быть выбраны состояния, полностью определённые для прибора с ориентацией {90X}. Обозначим такие состояния как
и
. Тогда формулу (ф.19.4) можно переписать в следующем виде:
В таком представлении состояние |S〉 содержит только одну реализуемую группу виртуальных вариантов.
Объединим обе формулы (ф.19.4), (ф.19.5) и получим:
Как это всё трактовать физически? Формулы (ф.19.4), (ф.19.5) - это просто два разных способа группировки одного и того же множества виртуальных вариантов. Мы уже встречались с подобным раньше, смотрите, например, рисунок 13.5 . Там мы группировали виртуальные варианты по разным наблюдаемым физическим величинам: по значениям координат или по значениям импульсов.
{kind=link}
Здесь тот же принцип. В формуле (ф.19.4) виртуальные варианты сгруппированы по значениям проекции момента импульса на ось Z. В формуле (ф.19.5) - по значениям проекции момента импульса на ось Y. Проекции момента импульса на разные направления - это, вообще говоря, разные физические величины. В том же смысле, как разными физическими величинами являются, например, координаты X, Y, Z, описывающие положение частицы в пространстве. То есть, выбор базисных состояний - это просто выбор способа представления одного и того же квантового состояния. Или, что то же самое, выбор способа группировки виртуальных вариантов. Так что у нас тут имеется произвол «в пределах разумного»: мы можем использовать любой физически осмысленный набор базисных состояний и выбирать тот, который наиболее удобен для расчётов в каждом конкретном случае. «В пределах разумного» означает, что:
а) группировка должна осуществляться по значениям каких-либо наблюдаемых (классических) физических величин;
б) получившийся набор базисных состояний должен быть полным, то есть, достаточным для представления любого квантового состояния.
Для прояснения опять приведу аналогию с координатами. Для точного представления любого мыслимого положения и движения материальной точки в пространстве нам необходимо три "базисных" координаты, например, X, Y, Z. Набор из двух "базисных" координат будет уже не полным. Но мы вольны в выборе системы координат. В этом смысле у нас в распоряжении бесконечное количество возможных координатных "базисов", выбирай тот, который удобнее.
Как правило (но не всегда) резонно использовать базисные состояния, логически привязанные к конкретным способам измерения, то есть, к физическим возможностям измерительного базиса. Скажем, прибор в ориентации {0} способен "выловить" из всего множества виртуальных вариантов только те, для которых проекция момента импульса на направление Z равна либо
, либо
(см. часть 14). Группы таких виртуальных вариантов мы обозначили как |0+〉 и |0-〉. Эти и только эти виртуальные варианты являются реализуемыми в измерительном базисе {0}. Значит, именно эти группы удобно использовать в качестве базисных состояний (ф.19.3). А рассматривая два или больше измерительных базиса, как мы это сделали, обсуждая опыт с рисунка 19.5, можно перейти к другим базисным состояниям, реализуемым в новом базисе (ф.19.5). Или можно одновременно использовать оба набора базисных состояний, корректно соотнося их друг с другом (ф.19.6).
Начиная с части 16 и до этого места мы оперировали с квантовыми состояниями одиночных частиц. В следующей части мы поговорим о квантовых состояниях систем, включающих две частицы и более.
Продолжение