Deimos-2
Им лет не много, и не мало
Но их судьба предрешена:
Они еще не генералы,
И не проиграна война.
З. Ященко

Космический аппарат Deimos-2
Cверх-идея обобщить информацию про все низкоорбитальные спутники с электроракетными двигательными установками оборачивается одним постом про такие аппараты раз в полгода. Обратил внимание на изделия южнокорейской компании Satrec Initative, из которых в качестве примера был выбран Deimos-2, созданный в интересах испанской компании Deimos Imaging. Двигательная установка такого аппарата является западным аналогом КДУ на базе стационарного плазменного двигателя СПД-50 родных и близких мне аппаратов типа «Канопус-В».
Deimos-2 имеет массу около 300 кг, и достаточно внушительные габаритные размеры (размер корпуса в сечении 1,5 м, длина около 2 м - практически как упомянутый «Канопус») - аппараты такого форм-фактора становятся основной полезной нагрузкой для ракеты-носителя (в случае испанского аппарата это был «Днепр»). Понятно, что разворачивать систему таких спутников куда сложнее, чем, скажем, систему из аппаратов SkySat-С, пятерка которых легко помещается под обтекатель легкой РН Vega. Поэтому канонические эксплуатанты изделий Satrec Initiative располагают «флотом» из единственного спутника с одной-двумя станциями приема целевой информации, для повышения привлекательности своего продукта (в первую очередь - оперативности съемки) они сформировали альянс PanGeo, куда вошла и российская «Даурия Аэроспейс». Конкурировать PanGeo приходится не с кем нибудь, а с Planet.
Можно сказать, что в вечной борьбе нового и консервативного Deimos-2 олицетворяет собой традиционные технологии, недаром он похож на маленькие Pleiades (чем завоевал мою симпатию). Поэтому дальше речь пойдет о канонических технических решениях, которые были однозначным и оптимальным выбором... пока не появился SkySat.
Deimos Imaging, Satrec Initiative и PanGeo

Орбитальная группировка Deimos Imaging
Deimos-2, как нетрудно догадаться из названия, является вторым спутником в орбитальной группировке испанской фирмы Deimos Imaging, дочернего предприятия канадской компании UrtheCast. Первый аппарат, Deimos-1, был создан британской компанией SSTL на базе платформы SSTL-100, запущен летом 2009 года, и передает снимки среднего разрешения (22 м). Для повышения конкурентоспособности компании первый аппарат был усилен спутником, снимающим Землю с высоким пространственным разрешением.

Спутники корейской компании. Для TeLEOS-1 SI сделала только полезную нагрузку, запуск KhalifaSat запланирован на 2018 год
В качестве подрядчика была выбрана южнокорейская фирма Satrec Initiative (“Satrec” расшифровывается как Satellite Research Centre, раньше даже название писали как SatReC), которая в том же 2009-м году обеспечила запуск малого спутника RazakSat в интересах Малайзии (к слову, вывела аппарат на орбиту РН Falcon-1). Космический аппарат был создан на платформе SI-200 и снимал земную поверхность с разрешением 2,5 м. Одновременно Satrec создавала новую платформу SI-300 и - на её базе - спутник высокодетального наблюдения DubaiSat-2 для Объединенных Арабских Эмиратов. Deimos-2 стал «братом-близнецом» ближневосточного спутника, был запущен через полгода после старта первенца (всем интересно посмотреть на результаты летных испытаний). Надо сказать, что при изучении изображений блоков и схем спутников из Южной Кореи, мне кажется, что в них используются технологии SSTL, и на этапе становления компании не обошлось без передачи британских технологий. Впрочем, в плане техники SI и SSTL идут разными путями (сравни Deimos-2 хотя бы с NigeriaSat-2). Более того, SI обучает спутникостроению работников MBRSC (Mohammed Bin Rashid Space Center, бывший EIAST (Emirates Institution for Advanced Science and Technology), ОАЭ), и новый арабский аппарат KhalifaSat изготавливается уже в Эмиратах (предварительно инженеры MBRSC прошли обучение прошли обучение в Ю.Корее).

Периодичность съемки КА Deimos-2
Создание и эксплуатация космического комплекса дистанционного зондирования Земли - занятие весьма дорогостоящее, в частности, Deimos-2 стоил без малого $80 млн. По этому для многих операторов один-два спутника - это максимум того, что они могут себе позволить. А один спутник в любом случае будет проигрывать в оперативности съемки (то есть а) времени между заказом съемки и передаче данных заказчику; б) периодичности повторной съемки заданного участка местности) группировке аппаратов. Очевидное решение для таких операторов - объединяться, именно так был создан альянс
PanGeo, в котором работает большинство изделий Satrec Initiative (что очень логично - идентичные спутники передают данные в идентичных форматах, технических сложностей с приемом и обработкой «чужих» данных быть не может). Ниже изображен «флот» космических датчиков PanGeo, снимающих в высоком разрешении («датчиков» - т.к. камера Iris установлена на борту МКС).

HD-сенсоры PanGeo
Запуски и орбиты космических аппаратов Satrec
Dubaisat-2 - РН «Днепр» - Домбаровский, Россия - ПУ№1/3 - 21.11.2013 г. - 10:10:17 ДМВ - солнечно-синхронная орбита высотой 600 км, LTDN = 10:30 [1];
Deimos-2 - РН «Днепр» - Домбаровский, Россия - ПУ№1/3 - 19.06.2014 г. - 22:11:17 ДМВ - солнечно-синхронная орбита высотой 610 км, LTDN = 22:30 [2].
TeLEOS-1 - РН PSLV-C29 (CA) - Шрихарикота, Индия - 22.12.2015 г. - 12:30:00 UTC - приэкваториальная круговая орбита, h= 530 км, i = 15° [3]
План
KhalifaSat - РН H-IIA - Танегасима, Япония - 2018 г. - солнечно-синхронная орбита высотой 613 км.
Космический аппарат Deimos-2

Внешний вид Deimos-2

Конструкция спутника
Тактико-технические характеристики
Разрешение при съемке в надир: 1 м в панхроматическом диапазоне и 4 м в спектральных каналах. При постобработке возможно получение разрешения до 0,75 м в панхроме до 3 м в мультиспектре.
Заказчик: Deimos Imaging, Испания - дочернее предприятие UrtheCast, Канада.
Исполнитель: Satrec Initiative, Тэджон, Южная Корея.
Орбита: солнечно-синхронная, высотой 620 км, местное время восходящего узла (LTAN) 10:30.
Выведение: при помощи РН «Днепр», который вывел аппарат на начальную орбиту высотой 600 км, причем наклонение было выбрано так, чтобы за 7 лет полета при отсутствии коррекции LTAN оставалось в пределах 10...11 часов.
Масса: 297,5 кг. Габариты: 1,5х1,5х1,95 м.
Срок активного существования: 7 лет (с доведением до 10).
Стоимость: 78 млн. долл.
Страница проекта на сайте eoportal.org
Полезная нагрузка HiRAIS

Схема полезной нагрузки
Съемочная аппаратура создана Satrec Initiative и предназначена для получения изображений в панхроматическом диапазоне спектра (420-720 нм, разрешение 1 м при съемке в надир), а также в четырех спектральных каналах с разрешением 4 м: B (420-510 нм), G (510-580 нм), R (600-720 нм) и NIR (760-890 нм).
Съемка производится с отклонением оптической оси телескопа от надира на угол до 45° (крен), что обеспечивает полосу захвата 1200 км. Благодаря возможности проводить съемку с при углах тангажа до 30° есть возможность снять стереопару за один пролет.
Масса полезной нагрузки SkySat составляет 50 кг, потребление электрической энергии - 100 Вт.

Оптическая схема Корша
Телескоп выполнен по оптической схеме Корша, он имеет диаметр апертуры 415 мм и фокусное расстояние 5,7 м (угол поля зрения 1,2°). Асферические зеркала телескопа изготовлены из материала Zerodur, конструкция самого оптического прибора - из углепластика. Ширина полосы захвата - 12,2 км.
Оптико-электронное преобразование осуществляется пятью сборками ПЗС-матриц с временной задержкой накопления. В панхроматическом диапазоне задержка может составлять 6, 12, 24, 48 шагов, в каналах B и G - 4, 8, 16 и 2, 4, 8 шагов для R и NIR. Радиометрическое разрешение - 10 бит.
Отметим, что для обеспечения теплового режима полезной нагрузки угол между оптической осью телескопа и направлением на Солнце должен быть не менее 69°, это потом сыграет свою роль при определении циклограммы работы двигательной установки.

Спектральные характеристики съемочной аппаратуры
Обработка изображения на борту производится без потерь, кодирование соответствует CCSDS. Точность привязки без реперных точек составляет 100 м.
Режимы съемки:
- «кадровый» (размер кадра - 12х12 км);
- «маршрутный»;
- «съемка площадных объектов» - съемка области шириной до 24 км;
- «формирование стереопар».
Запоминающее устройство состоит из четырех банков и имеет емкость 256 Гбит, что соответствует длине маршрута 1400 км.
Радиолиния передачи целевой информации работает в Х-диапазоне со скоростью до 160 Мбит/с. Используется квадратурная фазовая манипуляция QPSK. Рупорная антенна радиолинии имеет одноосный привод и может перемещаться на угол 90°.

Антенна радиолинии целевой информации
Производительность космического аппарата составляет 150 тыс. км2 в сутки. Повторная съемка любой точки земной поверхности возможна через 2 суток (при угле крена 45°), на широтах выше 45° - через одни сутки.
Несколько слайдов про калибровку изображений [7, 8, 9]

Летняя съемка Гренландии

Зимняя съемка Антарктиды

Съемка в сумерки

Полигон в Ливии

Съемки полигона Libya-4
Космическая платформа SI-300

Структурная схема платформы
Система ориентации

Возможности системы ориентации по перенацеливанию спутника

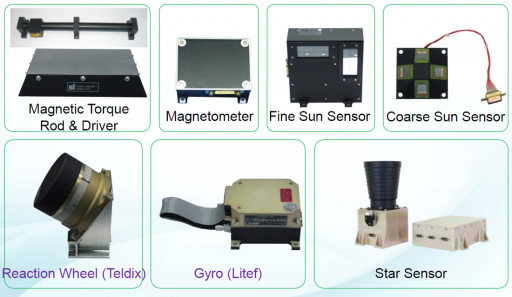
Блоки системы ориентации
{kind=link}
Система ориентации обеспечивает точность ориентации 0,015° и точность стабилизации 0,009°/с, при этом точность знания ориентации по информации от датчиков вдвое превосходит номинальную точность системы. Кроме того, Deimos-2 является «гибким» космическим аппаратом - он может обеспечить перенацеливание полезной нагрузки на 60° за полторы минуты. Для обеспечения энергетического баланса основным режимом полета спутника является режим ориентации панелей фотоэлектрических батарей на Солнце, понятно что переходить из этого режима в режим съемки (или передачи целевой информации) спутник должен уметь быстро. Попутно отметим, что на теневой части витка аппарат летит камерой в надир: это позволяет реже включать нагреватели полезной нагрузки и также экономить электроэнергию.
На борту Deimos-2 имеются следующие датчики системы ориентации:
- два звездных датчика;
- два магнитометра;
- два точных и четыре грубых датчика Солнца;
- два волоконно-оптических гироскопа;
- GPS-приёмник.
В качестве исполнительных органов применяются пять двигателей-маховиков, а для разгрузки последних - три электромагнита.
Бортовая вычислительная система
Вычислительная машина спутника построена на базе процессора LEON3 FT. Программное обеспечение работает под управлением операционной системы реального времени VxWorks.
На борту Dubaisat-2 организованы две шины CAN: одна для системы ориентации, вторая - для всех остальных систем и блоков. Шины дублированы, обмен информацией происходит со скоростями до 500 Кбит/с.
Система электропитания

Структурная схема системы электропитания
Солнечные батареи на базе арсенид-галлиевых фотоэлектрических преобразователей имеют мощность 450 Вт. Четыре «крыла» солнечных батарей на каркасах из сотовых панелей жестко закреплены на корпусе спутника, они раскрываются после выведения аппарата. На каждом «крыле» разместилось по 6 цепей из 26 соединенных последовательно фотоэлементов. Надо сказать, что такое конструктивное решение солнечных батарей для аппаратов высокодетального наблюдения является в высшей степени каноническим: Pleiades, SPOT-6/-7, WorldWiew-4, EgyptSat-2,.. список можно продолжить вплоть до первого отечественного связного спутника «Молния» или до первого отечественного частного спутника «Таблетсат-Аврора».
Аккумуляторные батареи - литий-ионные, пара блоков от заслуженной компании SAFT с общей емкостью 30 А·ч. Каждый блок содержит четыре соединенных параллельно цепи по восемь последовательно соединенных аккумуляторов MPS176065. Этот аккумулятор доминировал у SAFT на низких околоземных орбитах вплоть до появления VES16, впервые «облетанном» как раз на TeLEOS-1. MPS имеет призматическую форму, но рулонную упаковку электродов, что позволяет использовать конструктивные преимущества параллелепипеда и не изобретать вырубной штамп, который нужен для канонических призматических аккумуляторов (с укладкой электродов типа «стопка»). Штамп этот постепенно изнашивается, на краях электродов появляются неровности и заусенцы, которые в пределе могут привести к внутреннему короткому замыканию между электродами пакета. А страшнее КЗ для аккумулятора ничего нет: при нагревании разлагается кобальтат лития с выделением кислорода, затем воспламеняется органический электролит и возникает пожар. Да, MPS176065 делаются из коммерчески доступных компонентов, оттого стоят не слишком дорого. Глубина разряда батареи ограничена 20 %.
Аппаратура регулирования и контроля. Бортовая шина у спутника нерегулируемая, рабочее напряжение составляет 26...32 В. Для передачи энергии от солнечной батареи к аккумуляторной (и потребителям, конечно, тоже) служат четыре модуля заряда батареи (блок BCU). Модули заряда позволяют изменять значение максимального тока заряда: этим свойством пользовались в ходе начальной коррекции орбиты, когда для частых включений двигательной установки требовалось больше энергии и ток заряда был увеличен. После завершения коррекции ток заряда уменьшили: это положительно влияет на ресурс аккумуляторной батареи.
Для питания нагрузок без стабилизаторов во вторичных источниках питания на борту космического аппарата организованы стабилизированные шины напряжением +5, -5, +12 и -12 В.
Подключение бортовых потребителей к аккумуляторной батарее после отделения спутника от носителя осуществляет модуль реле (PSSM).
Командная радиолиния

Модули радиотехнических систем
Командная радиолиния работает в традиционном S-диапазоне, манипуляция BPSK, скорость передачи информации в обоих направлениях - 32 кбит/с. Формат данных соответствует стандартам CCSDS, есть аутентификация команд и шифрование телеметрии.
Двигательная установка

Стационарный плазменный двигатель КА Deimos-2
Двигательная установка спутника построена на базе стационарного плазменного двигателя, в иностранной печати СПД называют двигателями холловского типа. Двигатель космического аппарата Deimos-2 имеет тягу 7 мН, скорость истечения частиц рабочего тела составляет 10000 м/с. Напомню, что в стационарном плазменном двигателе рабочее тело (используется канонический ксенон) поступает в разрядную камеру, ионизируется и далее ионы ксенона ускоряются электростатическим потенциалом 250 В, который приложен между анодом-газораспределителем (на дне разрядной камеры) и катодом-компенсатором (используется катод от двигателя японской АМС Hayabusa). Для удержания плазмы в разрядной камере используется система магнитных катушек. Мощность потребления двигательной установки равна 300 Вт [4].
Система хранения и подачи ксенона обеспечивает хранение 3 килограммов рабочего тела под давлением до 150 бар в композитном баке, редуцирование давления до рабочего (2 бар) и обеспечение заданного потока ксенона в анод и катод (4...7 и 0...2 sccm - т. е. стандартных (при атмосферном давлении и 20°С) кубических сантиметров в минуту). Для поддержания выходного давления служат два ресивера, установленных по бокам от основного бака. Система управления следит за давлением в ресивере, и в зависимости от его значения открывает или закрывает электромагнитный клапан между ресивером и баком. Клапан открывается напряжением 28 В, удерживается напряжением 10 В (всё как у нас). Масса системы хранения и подачи ксенона составляет около 5 кг, габаритные размеры - 450х380х220 мм [5].
В полете были выявлены замечания к системе подачи ксенона - периодически частицы примесей в рабочем теле забивали катодный жиклер, уменьшая расход ниже штатного. Что характерно, источник примесей - электроклапаны, при работе которых и образовывались частицы.
Система преобразования и управления преобразует напряжение бортовой сети спутника в напряжения и токи, необходимые для питания нагрузок двигательной установки. Управление системой производится по интерфейсу CAN. В основной цепи анода установлена защита не только по току разряда, но и по выходу напряжения из рабочего диапазона. Магнитные катушки питаются от источника постоянного тока. Масса системы составляет 6,6 кг, габаритные размеры - 257х349х257 мм [4].
Ввиду существенной для малого космического аппарата электрической мощности двигательной установки изначально планировалось проводить включения на освещенной части витка, в районе одного из полюсов, когда и солнечные батареи будут направлены на нашу главную звезду, и вектор тяги совпадет с вектором скорости.
Жизнь оказалась интереснее: выяснилось, что на освещенной части витка жизнь аппарата расписана по секундам - именно здесь производится и съемка, и сброс целевой информации на Землю. А т. к. угол между осью телескопа полезной нагрузки и направлением на Солнце всегда должен превышать 69 градусов, образовалась большая запретная зона для работы двигательной установки на выходе из тени Земли. Поэтому маневры по наклонению решили проводить на теневом участке витка (в районе узла орбиты - там маневр энергетически наиболее эффективен). Ну и при необходимости проведения съемки или сброса информации производился перенос включения двигателя.

Пневматическая схема

Верхний «этаж» системы хранения и подачи ксенона

Нижний «этаж» СХП

Схема системы преобразования и управления

Сама система СПУ

Модули СПУ

Расположение вектора тяги двигательной установки

Ограничение на работу ДУ из-за засветки съемочной аппаратуры

Ограничение на работу ДУ из-за сеансов съемки и сброса целевой информации
Начальная коррекция орбиты [6]

«Днепр» отличился - оцените насколько реальные погрешности выведения меньше допустимых. Это дало экономию в 10 м/с характеристической скорости ДУ спутника
Ракета-носитель «Днепр» отработала программу идеально, еще раз подтвердив справедливость поговорки советских военных, что «Янгель работает на нас». За 12 часов был пройден начальный этап летных испытаний спутника, и стала актуальной задача перевода Deimos-2 на рабочую орбиту. Напомним, орбита выведения была выбрана ниже рабочей, с тем чтобы и при полном отказе ДУ обеспечивать солнечную синхронность в течение срока активного существования. Как водится, была разработана частная программа летных испытаний стратегия выполнения коррекции:

Как видно из циклограммы, начальная коррекция включала в себя следующие фазы:
- летные испытания двигательной установки;
- фаза А - уменьшение наклонения. Маневры проводились в нисходящем узле орбиты, на теневом участке витка. Было выполнено 270 включений двигателя. Длительность включений составляла 4, 6 или 8 минут, большая часть включений были 4-минутными. Наклонение было изменено на 0,032°, продолжительность фазы А составила 28 дней;
- фаза В - увеличение высоты орбиты и снижение эксцентриситета. Маневры выполнялись в апогее. Было выполнено 645 включений двигателя, также в основном 4-минутных. Высота орбиты была увеличена на 10 км, эксцентриситет уменьшили на 0,016. Продолжительность фазы В составила 59 дней.
Рабочая орбита была достигнута 01 ноября 2014 года, аппарату потребовалось немногим более 4 месяцев на коррекцию. Это, кстати, хорошо согласуется с временем довыведения на целевую орбиту КА EgyptSat-2. Всего было израсходовано 11,4 м/с запаса характеристической скорости или 305 грамм ксенона. Остаток запаса рабочего тела (2895 г) позволяет провести маневры с суммарной характеристической скоростью более 90 м/с. Основное замечание - снижение проходного сечения анодного и катодного жиклеров посторонними частицами. Способ устранения - циклическое изменение давления в ресивере (чтобы сдуть соринку).
Что сказать, красивая работа:

Изменение наклонения орбиты

Изменение большой полуоси орбиты
Наземный комплекс

Схема связи с Deimos-2
Наземный комплекс по части оборудования построен вполне канонически: связь с аппаратом и в канале управления, и для сброса целевой информации ведется с основной станции управления и приема данных, расположенной в Пуэртольяно (Испания). Понятно, что количество сеансов связи ограничено чисто баллистическими законами, поэтому для сброса целевой информации при необходимости привлекается норвежская станция Svalbard на архипелаге Шпицберген. Ниже приведена иллюстрация зоны радиовидимости станции и треки аппаратов системы RadidEye - видно, что связь с низкоорбитальным аппаратом может быть установлена практически на каждом витке. Раз в полтора часа (а при удачном стечении обстоятельств и если добавить станцию Troll в Антарктиде - раз в 45 минут). Понимаете, почему станция Svalbard является самой загруженной в мире, и ради чего по дну Северного Ледовитого океана к архипелагу было протянуто оптоволокно?
Недавно услышал хорошую метафору: спутники дистанционного зондирования Земли, которые произвели съемку, напоминают пчел, набравших на цветах меда. И их основная задача - донести мед до улья, то есть сбросить данные на приемную станцию. Так вот, расположение норвежских «ульев» позволяет отлично организовать «медосбор»... И к станциям Planet, разбросанным по всему земному шару уже как-то иначе относишься, особенно если в качестве «пчелы» выступает SkySat.

Антенна основной станции в Пуэртольяно (Испания) диаметром 10 м

Зона радиовидимости земной станции Svalbard (Шпицберген)
Фотографии спутника

Динамическое изделие. Верхняя часть

Динамическое изделие. Нижняя часть

Динамическое изделие. На вибростенде

Испытания полезной нагрузки

Испытания опытных образцов

Космический аппарат в монтажно-испытательном комплексе

Электрорадиотехнические испытания

В безэховой камере

На адаптере ракеты-носителя
Космоснимки

Доха, Катар, июнь 2014 г.

Порт Сидней, Австралия, июнь 2014 г.

Нью-Йорк, США, август 2014 г.

Рио-де-Жанейро, 5 августа 2016 г.
Замечания, исправления и дополнения всячески приветствуются.
Литература
1. И. Афанасьев «Экспериментальные микроспутники россыпью» / «Новости космонавтики». - 2014. - №01. - С. 48-55;
2. И. Афанасьев, И. Маринин «Первый российский частный спутник на орбите» / «Новости космонавтики». - 2014. - №8. - С. 21-33;
3. Д. Бецис «Индия и Сингапур: два юбилея и шесть спутников над экватором» / «Новости космонавтики». - 2012. - №2. - С. 48-51.
4. Khalid Ibrahim Anoohi, Mr. Choo, Won-Gyo, Mr. Jeong, Yun-hwang The Development of 260W Power Processing Units for Hall Effect Propulsion System / IEPC-2011-179
5. Y. Kim, S. Kang, Y. Jeong, J. Seon, J. Wee, H. Yoon, J. Lee, M. Seo, W. Choi Development of Xenon feed system for a 300-W Hall-Thruster / IEPC-2009-061
6. M.L. Cerron, F.G. Meeruelo, C.D. Urgoiti, A. Mazzoleni, F. Pirondini, M.B. Mora Deimos-2 Initial Orbit Acquisition Operations / 25th International Symposium on Space Flight Dynamics ISSFD October 19 - 23, 2015, Munich, Germany pdf
7. J. Gil, A. Romo, C. Moclan, F. Pirondini, D. Lozano, E. Gonzalez, J. Quirce, Deimos-2 Radiometric Calibration and Cross-calibration with Dubaisat-2 / Proceedings of JACIE 2014 (Joint Agency Commercial Imagery Evaluation) Workshop, Louisville, Kentucky, March 26-28, 2014 pdf
8. J. Gil, A. Romo, C. Moclán, F. Pirondini Deimos-2 Post-launch radiometric calibration / JACIE (Joint Agency Commercial Imagery Evaluation)Workshop , Tampa, FL, USA, May 4-8, 2015 pdf
9. J. Gil, A. Romo, C. Moclán, F. Pirondini Deimos-2 post-launch radiometric calibration / 14th JACIE (Joint Agency Commercial Imagery Evaluation) Workshop, Tampa, FL, USA, May 5-7, 2015, pdf
10. А.М. Аронов, В.А. Данилов, В.О. Никифоров, А.М. Савицкий, М.Н. Сокольский Оптико-электронные системы для дистанционного зондирования Земли / 23.01.2007, Спб.pdf
Все иллюстрации взяты из публикаций.