Беспилотные автомобили
Тех, кто не знаком с Лекспартизаном, предупреждаю, что это блогер исповедует "радикальную честность" и никогда не стесняется в выражениях. Не все читатели такое способны переносить, но материал чрезвычайно интересный и заслуживает внимания. Как никак, речь идёт о нашем ближайшем будущем))
Оригинал взят у lexpartizan в Беспилотные автомобили.
Беспилотные автомобили грозят изменить мир и лишить работы сотни миллионов людей.
Беспилотный общественный транспорт уже работает на маршрутах, а беспилотная служба такси вполне позволит отказаться от собственной машины, так как будет гораздо дешевле. Как показало исследование Колумбийского университета, 9 тыс. автономных автомобилей могут с легкостью заменить все такси Нью-Йорка. При этом на ожидание заказанной машины уйдет не более 40 секунд.
Однако, пока это всё вопрос отдалённого будущего.
Юридическая проблема.
Кто будет отвечать в случае аварии? Проблема явно надумана "сраной интеллигенцией" из породы "борцов за права человека против здравого смысла". Если автомобиль является полуавтономным и представляет собой некий драйв-ассистент для езды по трассам, то виноват, конечно, водитель. Это его задача вовремя перехватить управление в критической ситуации. Именно поэтому я считаю, что драйв-ассистенты крайне вредны и опасны. Они не рассчитаны на сложные ситуации, которые могут возникнуть в любой момент. Более того, свободный от управления водитель может воткнуть в кино, заснуть, заняться сексом с попутчицей на ходу. И просто будет неспособен вовремя получить управления. Даже если водитель будет постоянно на стрёме и держать руки на руле, ему всё же требуется несколько секунд, чтобы снова "слиться с машиной" и восстановить управляемость. А резкая передача управления может привести к неконтроллируемым последствиям. Я уж молчу, что водитель в нештатной ситуации может запаниковать, но в любом случае управление возьмёт в свои руки. Так что я категорически против существующих на данный момент "автопилотов" Тесла и других помагателей. Руль должен держать кто-то один.
В случае же полностью автономного авто проблема отвественности ложится на компанию-производителя и решается в обычном страховом порядке выплатами жертвам ДТП. Так как "водитель" в таком авто является не более, чем пассажиром, даже если он там один. Проблема просто надумана "сраной интеллигенцией", которая повинуется инстинкту толпы и просто требует чьей-то крови. Обычно такой категории людей наплевать, чьей.
Так как аварийность автономных авто будет гораздо ниже обычных, не вижу проблем выплачивать большие компенсации жертвам ДТП, если виновником является робомобиль.
Этические проблемы.
- Даю вводную. Вы управляете движущимся транспортным средством. Впереди перед вами неожиданно возникают две человеческие фигуры - старушка и девочка. Кого будете давить?
- Гм... Ну, это... Старушку.
- Тормоз. Тормоз давить надо!
Тут проблемой является то, что в безвыходной с точки зрения компьютера ситуации, автомобиль может принести в жертву своего хозяина, предпочтя его жизнью заплатить за жизнь других людей. И это, по мнению "интеллигенции" ужаснах. На самом деле, катаясь в такси, вы доверяете свою жизнь незнакомому и, возможно, неадекватному человеку, который постарается при опасной ситуации увести из под удара себя, подставив пассажирское место. Просто инстинкт самосохранения. И ничего, никто не жужит. Так что в данном случае тоже придётся доверить жизнь компании-производителю автоавтомобиля.
Лично я считаю юридические и этические проблемы абсолютно надуманными.
А вот технические проблемы - это уже серьёзно.
Технические требования.
Масимальная скорость по автомагистрали 120 км\ч. Тормозной путь, учитывая мгновенную реакцию компьютера примерно 100 метров. Зимой, конечно, больше, но зимой и скорости должны быть меньше, пусть это и не указано в ПДД.
Удвоим эту дистанцию, так как движение может быть встречным.
То есть, исходя из этого компьютер должен ориентироваться в радиусе 200 метров в реальном времени.
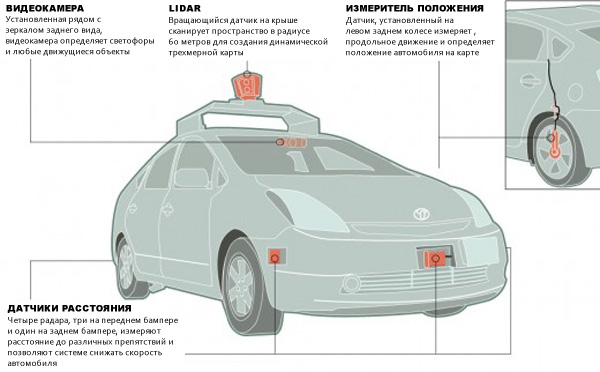
Автомобиль ориентируется с помощью нескольких систем.
1. GPS. Является базовой точкой отсчёта местоположения и позволяет автоавтомобилю выстраивать маршрут. Эта технология имеет ряд значительных ограничений. Во-первых, ее использование требует «прямой видимости неба», что исключает возможность ее применения в туннелях, закрытых парковках и, даже, в лесу. Но, что еще важнее, GPS не обладает достаточной точностью для реализации поставленной задачи. Погрешность этой технологии колеблется в пределах метров, а когда речь идет о движении по оживленной улице, значение имеет каждый сантиметр. «Мы часто используем GPS, как точку отсчета в алгоритме локализации» - говорит Маддерн - «но мы не полагаемся на него, когда определяем, в какой полосе находится автомобиль».
Однако, GPS всё же может достигать сантиметровой точности.
Ученые описали свою технологию в журнале «GPS World» в феврале этого года. После этого они провели эксперименты с 5$ антенной, которая более высококачественная, чем антенны смартфонов. Самым важным достижением команды Хамфриса стало создание мощного и чувствительного программно-конфигурируемого GPS-приемника GRID.
Хамфрис говорит, что они использовали эту антенну и свое программное обеспечение с телефоном Samsung Galaxy для генерирования трехмерной карты крыши своего здания, основываясь на глобальных координатах с точностью до двух сантиметров.
Им также удалось отслеживать с той же точностью гарнитуру виртуальной реальности, а также наклоны и повороты с точностью до градуса.
С другой стороны это очень похоже на использование акселерометра\гироскопа, так что может быть фейком.
Ну и, конечно, можно понатыкать везде базовых станций для уточнения сигнала GPS.
2. Лидар.
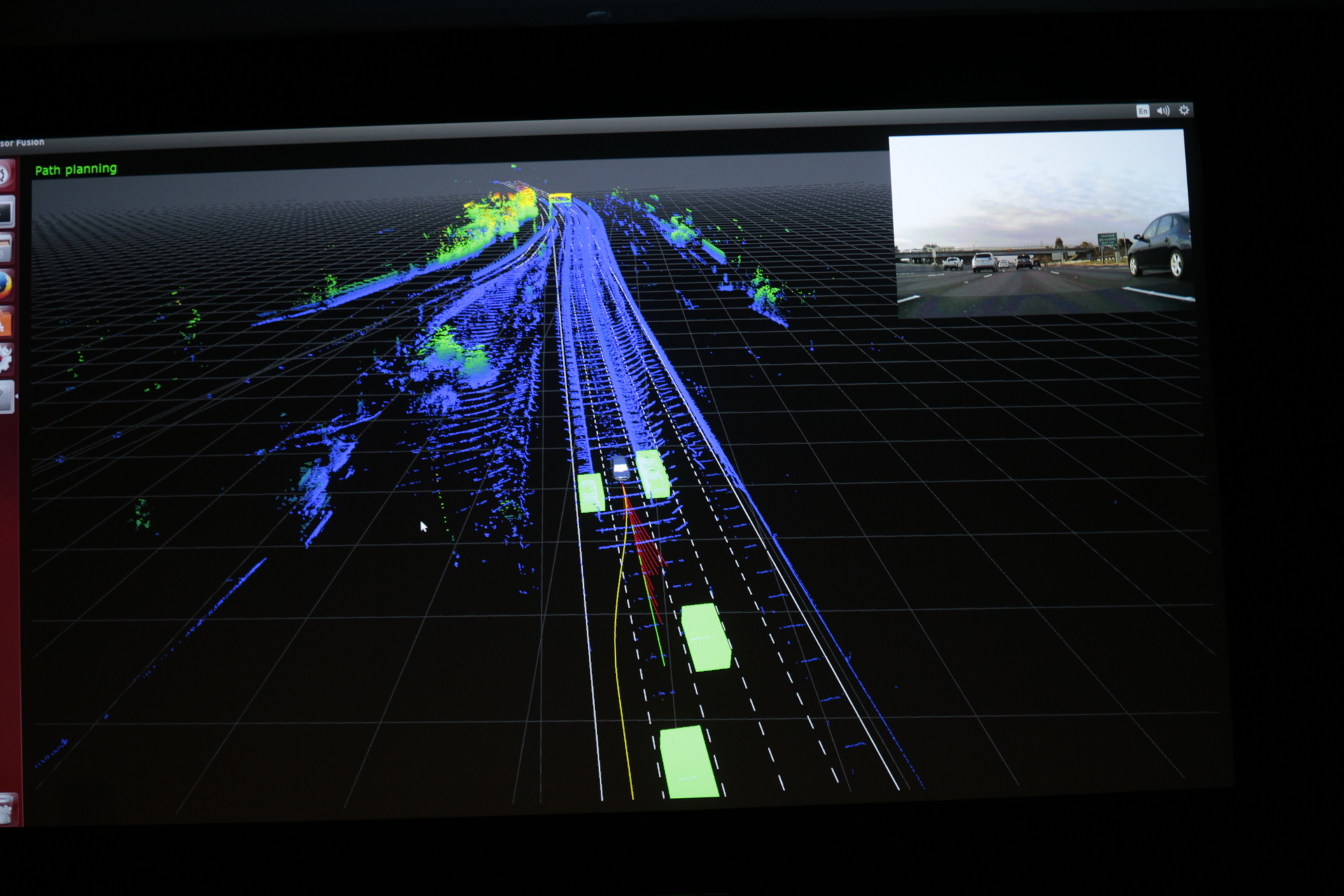
Представляет собой лазерный радар\зд-сканер. С помощью его данных автоавтомобиль выстраивает 3х-мерную карту местности из облака точек. Выглядит это примерно вот так.

С помощью облака точек легко определить скорость и размеры объектов.
Однако, главный недостаток лидара - цена. Он может стоить от 8 000$ до 80 000$. Что дороже самого авто. Tesla Motors по этой причине не использует лидар в своём автопилоте, если я не ошибаюсь. Однако, не всё так грустно.
Злобные военные Пиндостана умудрились избавится от механики, карданова подвеса, линз, сервоприводов и прочего с помощью лазера и Фазированной антенной Решётки. Всё это удалось уместить на обычный микрочип, повысив надёжность и увеличив скорость сканирования в тысячи раз.
Воодушевлённая DARPA объявила о начале пятилетней программы MOABB для создания универсальной замены оптическим телескопам и электронно-оптическим системам наблюдения. Ученые планируют потратить на разработку 58 миллионов долларов.
Исследователи надеются получить очень компактный лидар площадью около десяти квадратных сантиметров. На нем военные разместят примерно десять тысяч оптических приемо-передатчиков.
58 млн. Лучше, чем тратить столько же миллиардов на олимпиаду. Это будет реальное машинное зрение.
А тем временем компания Quanergy Systems, офис который располагается в небольшом городке Саннивейл в округе Санта-Клара штата Калифорния, заявила, что она сможет предложить лазерный сканирующий дальномер (LIDAR) стоимостью 250$ и размером с кредитную карту уже в следующем году. В 2018 году она обещает сенсор размером с почтовую марку и стоимостью 100$ или даже дешевле. «Это стало возможным благодаря твердотельной лазерной системе»- говорит исполнительный директор компании Louay Eldada, научная работа которого, благодаря которой он получил ученую степень в Колумбийском университете, легла в основу технологии. Eldada продемонстрировал 1000$ версию сканирующего дальномера в Детройте и заявил, что компания представит более дешевый 250$ твердотельный сенсор на выставке Consumer Electronics Show в январе 2016 года. Он отказался от сообщения подробностей того, каким образом может функционировать такая система. Сенсор Quanergy не будет иметь вращающихся частей и Eldada говорит, что он будет стабильно работать в условиях, когда идет дождь или снег.
Так что не только вояками жив Пиндостан. Почему-то мне кажется, что это одна и та же технология. В любом случае ждём с нетерпением.
3. Камеры.
Камеры могут использоваться как для построения 3Д так и для получения обычной картинки для распознавания. Как из камер получают трёхмерное представление я описывал в статье, посвящённой виртуальной реальности.
Одной из основных задач в стереовидении является проблема соответствия: для данной точки на одном изображении, как найти ту же точку на снимке с другой камеры? До того, пока соответствие не установлено, разница и, следовательно, глубина, не могут быть точно определены. Решение задачи нахождения соответствия включает сложные, затратные по вычислениям алгоритмы выделения элементов и их сопоставления. Выделение элементов и их сопоставление также требует достаточной интенсивности и изменчивости цвета на изображении для устойчивой корреляции. Это требование делает стерео зрение менее эффективным, если предметы не обладают такой изменчивостью.
Учитывая проблемы и низкую производительность перевода стереокартинки в зд, всё же для получения зх-мерных данных приходится пользоватся лидаром. Кроме того, камеры сильно зависят от погоды и освещения. Ночью они практически не работают. Лидар более приспособлен для таких условий. Но попытки работать с камерами, конечно, ведутся. Это самый дешёвый способ.
Так что камеры в основном используются для распознавания изображений. Для определения знаков, разметки, людей, объектов. А вот данные о их месторасположении и скорости берутся в основном с лидара.
Хотя авторы нейронной сети SegNet утверждают, что смогут обойтись и без него.
Как говорится в пресс-релизе, первая часть системы берёт изображение улицы, которой ещё нет в её базе, и классифицирует её, распределяя объекты в 12 разных категорий - дороги, уличные знаки, пешеходы, здания, велосипедисты и так далее. Всё это - в режиме реального времени. Система может работать со светом, тенями и ночными окружениями, и на данный момент корректно классифицирует более 90 % пикселей. Впрочем, этого пока не хватает для автоавтомобиля. А также непонятно, как система сможет определять направление и скорость других участников дорожного движения.
Гугл тоже не дремлет. Его новая система распознавания пешеходов стала быстрее в 60 раз.
Она может точно определять пешеходов примерно за 0,25 секунды. Для систем реального времени требуется 0,07 секунд.
Программное обеспечение.
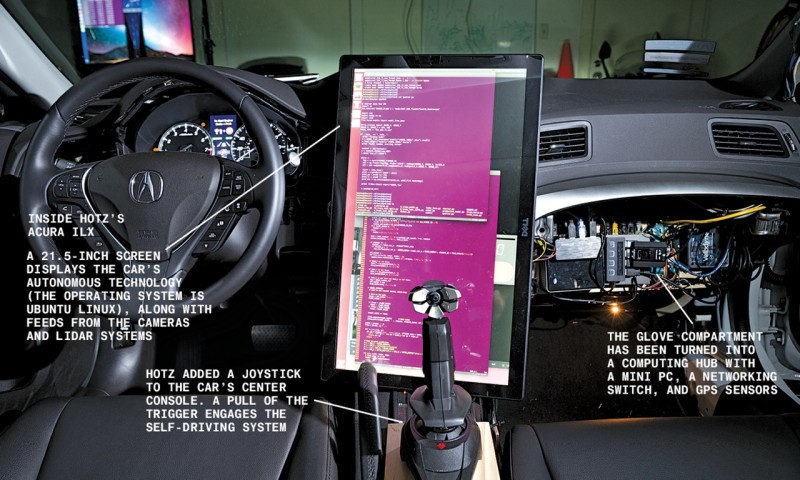
Как вы уже заметили, для самодвижущихся тележек активно используют нейронные сети. На всех этапах. От распознавания образов до планирования действий. И это даёт заметный результат, хотя, в отличии от традиционного программирования вовсе его не гарантирует. Нейронные сети оказались настолько эффективными, что даже хакер-одиночка бросает вызов громадным корпорациям всего через пару месяцев работы над проектом, запилив свою повозку с блекджеком и шлюхами.
Нейросети для авто являются сложными, многоуровневыми, глубокими.
Цель внешнего слоя - обработать информацию и донести до "ядра" примерно такую трёхмерную сцену

Хотя в реальности она выглядит скорее так:
Ну и, конечно, для такого программного обеспечения требуется соотвествующее аппаратное обеспечение. При работе с беспилотным автомобилем нам однозначно понадобятся нейросети и распознавание изображений.
И Nvidia выпустила суперкомпьютер для энтузиастов беспилотного вождения. Drive PX 2.
Суммарно на плате 2 SoC-процессора. В каждом 2 ядра Denver ARMv8 и 4 ядра Cortex-A57(могли бы и Cortex-A72 поставить) и 2 видеоускорителя архитектуры Pascal. Именно эти GPU и дают основную производительность. А её не мало, около 8 терафлопс. Конечно, за всё это великолепие приходится платить, и нетолько деньгами. Несмотря на самый современный техпроцесс в 16 нм, плата греется, что чайник и требует принудительного жидкостного охлаждения. Кроме того с железкой идёт нейросеть, которую месяц обучали на миллионе изображений и другие программные ништяки, вроде облачных сервисов и тд и тп.
Куда девать старую машину?
Хорошо, допустим беспилотные машины покорят автотрассы. Но это случится очень нескоро, ведь автопарк полностью не заменить в ближайшее время. А значит, будет выгоднее содержать живых водителей на старых автомобилях.
Однако, на самом деле давно существуют комплекты для переделки обычного автомобиля в автомобиль на радиоуправлении.

Даже ИГИЛовцы пользуются подобными технологиями. Хрен с ними, арабами. Даже русские так умеют с самолётами и катерами.
Так что никуда старый автопарк не денется. А вот водителям стоит подготовиться к работе в ночную смену. Пока...
Профсоюзы водителей, конечно, будут против. Будут погромы, луддитство, подстроенные аварии... Но прогресс не остановить.
Общие итоги.
В скором времени, очевидно, технологии выйдут на уровень недорого беспилотного автомобиля. Лидары дешевеют, распознавание образов развивается, нейросети обучаются.
Количество перерастает в качество, качество в массовость, массовость в доступность.
Если, конечно, дебильные "драйв-ассистенты" не натворят кучу аварий с заснувшими водилами и от разработок беспилотного транспорта придётся временно отказаться под влиянием общественности.
Оригинал взят у lexpartizan в Беспилотные автомобили.
Беспилотные автомобили грозят изменить мир и лишить работы сотни миллионов людей.
Беспилотный общественный транспорт уже работает на маршрутах, а беспилотная служба такси вполне позволит отказаться от собственной машины, так как будет гораздо дешевле. Как показало исследование Колумбийского университета, 9 тыс. автономных автомобилей могут с легкостью заменить все такси Нью-Йорка. При этом на ожидание заказанной машины уйдет не более 40 секунд.
Однако, пока это всё вопрос отдалённого будущего.
Юридическая проблема.
Кто будет отвечать в случае аварии? Проблема явно надумана "сраной интеллигенцией" из породы "борцов за права человека против здравого смысла". Если автомобиль является полуавтономным и представляет собой некий драйв-ассистент для езды по трассам, то виноват, конечно, водитель. Это его задача вовремя перехватить управление в критической ситуации. Именно поэтому я считаю, что драйв-ассистенты крайне вредны и опасны. Они не рассчитаны на сложные ситуации, которые могут возникнуть в любой момент. Более того, свободный от управления водитель может воткнуть в кино, заснуть, заняться сексом с попутчицей на ходу. И просто будет неспособен вовремя получить управления. Даже если водитель будет постоянно на стрёме и держать руки на руле, ему всё же требуется несколько секунд, чтобы снова "слиться с машиной" и восстановить управляемость. А резкая передача управления может привести к неконтроллируемым последствиям. Я уж молчу, что водитель в нештатной ситуации может запаниковать, но в любом случае управление возьмёт в свои руки. Так что я категорически против существующих на данный момент "автопилотов" Тесла и других помагателей. Руль должен держать кто-то один.
В случае же полностью автономного авто проблема отвественности ложится на компанию-производителя и решается в обычном страховом порядке выплатами жертвам ДТП. Так как "водитель" в таком авто является не более, чем пассажиром, даже если он там один. Проблема просто надумана "сраной интеллигенцией", которая повинуется инстинкту толпы и просто требует чьей-то крови. Обычно такой категории людей наплевать, чьей.
Так как аварийность автономных авто будет гораздо ниже обычных, не вижу проблем выплачивать большие компенсации жертвам ДТП, если виновником является робомобиль.
Этические проблемы.
- Даю вводную. Вы управляете движущимся транспортным средством. Впереди перед вами неожиданно возникают две человеческие фигуры - старушка и девочка. Кого будете давить?
- Гм... Ну, это... Старушку.
- Тормоз. Тормоз давить надо!
Тут проблемой является то, что в безвыходной с точки зрения компьютера ситуации, автомобиль может принести в жертву своего хозяина, предпочтя его жизнью заплатить за жизнь других людей. И это, по мнению "интеллигенции" ужаснах. На самом деле, катаясь в такси, вы доверяете свою жизнь незнакомому и, возможно, неадекватному человеку, который постарается при опасной ситуации увести из под удара себя, подставив пассажирское место. Просто инстинкт самосохранения. И ничего, никто не жужит. Так что в данном случае тоже придётся доверить жизнь компании-производителю автоавтомобиля.
Лично я считаю юридические и этические проблемы абсолютно надуманными.
А вот технические проблемы - это уже серьёзно.
Технические требования.
Масимальная скорость по автомагистрали 120 км\ч. Тормозной путь, учитывая мгновенную реакцию компьютера примерно 100 метров. Зимой, конечно, больше, но зимой и скорости должны быть меньше, пусть это и не указано в ПДД.
Удвоим эту дистанцию, так как движение может быть встречным.
То есть, исходя из этого компьютер должен ориентироваться в радиусе 200 метров в реальном времени.
Автомобиль ориентируется с помощью нескольких систем.
1. GPS. Является базовой точкой отсчёта местоположения и позволяет автоавтомобилю выстраивать маршрут. Эта технология имеет ряд значительных ограничений. Во-первых, ее использование требует «прямой видимости неба», что исключает возможность ее применения в туннелях, закрытых парковках и, даже, в лесу. Но, что еще важнее, GPS не обладает достаточной точностью для реализации поставленной задачи. Погрешность этой технологии колеблется в пределах метров, а когда речь идет о движении по оживленной улице, значение имеет каждый сантиметр. «Мы часто используем GPS, как точку отсчета в алгоритме локализации» - говорит Маддерн - «но мы не полагаемся на него, когда определяем, в какой полосе находится автомобиль».
Однако, GPS всё же может достигать сантиметровой точности.
Ученые описали свою технологию в журнале «GPS World» в феврале этого года. После этого они провели эксперименты с 5$ антенной, которая более высококачественная, чем антенны смартфонов. Самым важным достижением команды Хамфриса стало создание мощного и чувствительного программно-конфигурируемого GPS-приемника GRID.
Хамфрис говорит, что они использовали эту антенну и свое программное обеспечение с телефоном Samsung Galaxy для генерирования трехмерной карты крыши своего здания, основываясь на глобальных координатах с точностью до двух сантиметров.
Им также удалось отслеживать с той же точностью гарнитуру виртуальной реальности, а также наклоны и повороты с точностью до градуса.
С другой стороны это очень похоже на использование акселерометра\гироскопа, так что может быть фейком.
Ну и, конечно, можно понатыкать везде базовых станций для уточнения сигнала GPS.
2. Лидар.
Представляет собой лазерный радар\зд-сканер. С помощью его данных автоавтомобиль выстраивает 3х-мерную карту местности из облака точек. Выглядит это примерно вот так.
С помощью облака точек легко определить скорость и размеры объектов.
Однако, главный недостаток лидара - цена. Он может стоить от 8 000$ до 80 000$. Что дороже самого авто. Tesla Motors по этой причине не использует лидар в своём автопилоте, если я не ошибаюсь. Однако, не всё так грустно.
Злобные военные Пиндостана умудрились избавится от механики, карданова подвеса, линз, сервоприводов и прочего с помощью лазера и Фазированной антенной Решётки. Всё это удалось уместить на обычный микрочип, повысив надёжность и увеличив скорость сканирования в тысячи раз.
Воодушевлённая DARPA объявила о начале пятилетней программы MOABB для создания универсальной замены оптическим телескопам и электронно-оптическим системам наблюдения. Ученые планируют потратить на разработку 58 миллионов долларов.
Исследователи надеются получить очень компактный лидар площадью около десяти квадратных сантиметров. На нем военные разместят примерно десять тысяч оптических приемо-передатчиков.
58 млн. Лучше, чем тратить столько же миллиардов на олимпиаду. Это будет реальное машинное зрение.
А тем временем компания Quanergy Systems, офис который располагается в небольшом городке Саннивейл в округе Санта-Клара штата Калифорния, заявила, что она сможет предложить лазерный сканирующий дальномер (LIDAR) стоимостью 250$ и размером с кредитную карту уже в следующем году. В 2018 году она обещает сенсор размером с почтовую марку и стоимостью 100$ или даже дешевле. «Это стало возможным благодаря твердотельной лазерной системе»- говорит исполнительный директор компании Louay Eldada, научная работа которого, благодаря которой он получил ученую степень в Колумбийском университете, легла в основу технологии. Eldada продемонстрировал 1000$ версию сканирующего дальномера в Детройте и заявил, что компания представит более дешевый 250$ твердотельный сенсор на выставке Consumer Electronics Show в январе 2016 года. Он отказался от сообщения подробностей того, каким образом может функционировать такая система. Сенсор Quanergy не будет иметь вращающихся частей и Eldada говорит, что он будет стабильно работать в условиях, когда идет дождь или снег.
Так что не только вояками жив Пиндостан. Почему-то мне кажется, что это одна и та же технология. В любом случае ждём с нетерпением.
3. Камеры.
Камеры могут использоваться как для построения 3Д так и для получения обычной картинки для распознавания. Как из камер получают трёхмерное представление я описывал в статье, посвящённой виртуальной реальности.
Одной из основных задач в стереовидении является проблема соответствия: для данной точки на одном изображении, как найти ту же точку на снимке с другой камеры? До того, пока соответствие не установлено, разница и, следовательно, глубина, не могут быть точно определены. Решение задачи нахождения соответствия включает сложные, затратные по вычислениям алгоритмы выделения элементов и их сопоставления. Выделение элементов и их сопоставление также требует достаточной интенсивности и изменчивости цвета на изображении для устойчивой корреляции. Это требование делает стерео зрение менее эффективным, если предметы не обладают такой изменчивостью.
Учитывая проблемы и низкую производительность перевода стереокартинки в зд, всё же для получения зх-мерных данных приходится пользоватся лидаром. Кроме того, камеры сильно зависят от погоды и освещения. Ночью они практически не работают. Лидар более приспособлен для таких условий. Но попытки работать с камерами, конечно, ведутся. Это самый дешёвый способ.
Так что камеры в основном используются для распознавания изображений. Для определения знаков, разметки, людей, объектов. А вот данные о их месторасположении и скорости берутся в основном с лидара.
Хотя авторы нейронной сети SegNet утверждают, что смогут обойтись и без него.
Как говорится в пресс-релизе, первая часть системы берёт изображение улицы, которой ещё нет в её базе, и классифицирует её, распределяя объекты в 12 разных категорий - дороги, уличные знаки, пешеходы, здания, велосипедисты и так далее. Всё это - в режиме реального времени. Система может работать со светом, тенями и ночными окружениями, и на данный момент корректно классифицирует более 90 % пикселей. Впрочем, этого пока не хватает для автоавтомобиля. А также непонятно, как система сможет определять направление и скорость других участников дорожного движения.
Гугл тоже не дремлет. Его новая система распознавания пешеходов стала быстрее в 60 раз.
Она может точно определять пешеходов примерно за 0,25 секунды. Для систем реального времени требуется 0,07 секунд.
Программное обеспечение.
Как вы уже заметили, для самодвижущихся тележек активно используют нейронные сети. На всех этапах. От распознавания образов до планирования действий. И это даёт заметный результат, хотя, в отличии от традиционного программирования вовсе его не гарантирует. Нейронные сети оказались настолько эффективными, что даже хакер-одиночка бросает вызов громадным корпорациям всего через пару месяцев работы над проектом, запилив свою повозку с блекджеком и шлюхами.
Нейросети для авто являются сложными, многоуровневыми, глубокими.
Цель внешнего слоя - обработать информацию и донести до "ядра" примерно такую трёхмерную сцену
Хотя в реальности она выглядит скорее так:
Ну и, конечно, для такого программного обеспечения требуется соотвествующее аппаратное обеспечение. При работе с беспилотным автомобилем нам однозначно понадобятся нейросети и распознавание изображений.
И Nvidia выпустила суперкомпьютер для энтузиастов беспилотного вождения. Drive PX 2.
Суммарно на плате 2 SoC-процессора. В каждом 2 ядра Denver ARMv8 и 4 ядра Cortex-A57(могли бы и Cortex-A72 поставить) и 2 видеоускорителя архитектуры Pascal. Именно эти GPU и дают основную производительность. А её не мало, около 8 терафлопс. Конечно, за всё это великолепие приходится платить, и нетолько деньгами. Несмотря на самый современный техпроцесс в 16 нм, плата греется, что чайник и требует принудительного жидкостного охлаждения. Кроме того с железкой идёт нейросеть, которую месяц обучали на миллионе изображений и другие программные ништяки, вроде облачных сервисов и тд и тп.
Куда девать старую машину?
Хорошо, допустим беспилотные машины покорят автотрассы. Но это случится очень нескоро, ведь автопарк полностью не заменить в ближайшее время. А значит, будет выгоднее содержать живых водителей на старых автомобилях.
Однако, на самом деле давно существуют комплекты для переделки обычного автомобиля в автомобиль на радиоуправлении.
Даже ИГИЛовцы пользуются подобными технологиями. Хрен с ними, арабами. Даже русские так умеют с самолётами и катерами.
Так что никуда старый автопарк не денется. А вот водителям стоит подготовиться к работе в ночную смену. Пока...
Профсоюзы водителей, конечно, будут против. Будут погромы, луддитство, подстроенные аварии... Но прогресс не остановить.
Общие итоги.
В скором времени, очевидно, технологии выйдут на уровень недорого беспилотного автомобиля. Лидары дешевеют, распознавание образов развивается, нейросети обучаются.
Количество перерастает в качество, качество в массовость, массовость в доступность.
Если, конечно, дебильные "драйв-ассистенты" не натворят кучу аварий с заснувшими водилами и от разработок беспилотного транспорта придётся временно отказаться под влиянием общественности.