Есть у эволюции начало, но не всегда это прогресс. Второе поколение
Простите за задержку - был занят. Ездил на раскопки перми, в смысле пермского периода. Так получилось
Итак поговорим теперь о продолжении истории с подводными аппаратами
То,что "Антиподес" требуется смена не было ни для кого секретом. Решено было разрабатывать новый подводный аппарат в габаритах и возможностях совпадающий с старым - только новый.
"Антиподес" в его финанльной конфигурации полностью удовлетворял требованиям коммерческой эксплуатации - оставалось только повторить его на новом технологическом уровне.
Он стал первой самостоятельной разработкой фирмы OceanGate

Его разработку вели совместно с лабораторией Вашингтонского университета, и он оказался вполне успешной конструкцией. Аппарат вошел в строй в 2015м году и был поначалу, плодом успешного сотрудничества Гильермо Сенляйна и Стоктона Раша. Однако именно при постройке этого аппарата разошлись пути "отцов-основателей" филмы, Гильермо (уволился в 2013м году и перешел к работе в области космонавтики) и Стоктона . Стоктон Раш требовал при проектировании делать упор на дешевизне и технологичности производства (предполагалось серийное производство), Сенляйн настаивал на обеспечении надежности и высоких эксплуатационных качеств.
Конфликт начался с выбора материала для цилиндрической оболочки прочного корпуса аппарата - вместо проверенных стальных сплавов, Раш, имевший опыт сотрудничества с фирмой Боинг по разработке деталей из стекловолокна предлагал стекловолоконную трубу (приблизительно 160 слоев углеродного волокна суммарной толщиной около 40 мм) к которой крепился стальной сферический люк с одной стороны и прочная акриловая полусфера (подобная той, что была на модернизированном "Антиподес".Но это был только предварительный дизайн. НА деле "Сайклопс" был построен с стальным корпусом - просто в 2013м году появилась возможность заказать стальной цилиндр с нужными параметрами по очень выгодной цене. Раш который стремился сократить расходы счел необходимым сэкономить средства и это решение для "Циклопса-1" решение оказалось вполне рабочим и удачным. Оболочку из углепластика решили оставить для следующего аппарата. В общем хотел но не получилось и слава богу. Дополнительную плавучесть аппарату придавали спрятанные под легкой обшивкой попавки из синтактика (вспененного материала способного выдержать высокое давление, нечто подобное применил для своего батискафа "Деп Челлендеже" погружавшегося в Марианскую впадину Кэмерон) - вполне высокотехнологическое и оправдавшее себя решение.
Еще одно решение для первого Циклопа - применить джойстик от обычной компьютерной игровой приставки для управления аппаратом оказалось точно так же успешным.
И еще одно решение предложенное Рашем было достаточно спорным - он предложил отказаться от дифферентной системы - что бы управлять продольным креном аппарата при погружении и всплытии. Вместе общепринятой системы небольших цистерн куда закачиватся или перекачивается вода под давлением равным глубине погружения - балансировку аппарата при погружении стали осуществлять буквально гирями - подобным гирям от рычажных весов (в виде подковы) навешанными на балки "шасси" аппарата. Водолазы осуществлявшие контроль за погружением аппарата двигали эти грузики вдоль балки удиффрентовывая аппарат в горизонтальной плоскости. А в случае нужды, при погружениях дифферентовку осуществляли передвижением членов экипажа.
Это решение вызывыало бурное отторжение у профессиональных подводников (ибо не дает полноценного контроля за ситуацией пилоту подводного аппарата, вынуждая прибегать к методам балансировки принятой у дельтапланеристов, а так же делает зависимым успешное погружение и всплытие аппарата в нужном положении относительно воды от действий аквалангистов обеспечения). - но прокатило.
Приборное оборудование аппарата связывалось с внешним миром через две акриловые "командные сферы" - с разьемами для подключения кабелей для связи с аквалангистами, выходы на электромоторы и тд. Решение довольно традиционное для эпохи 1960х годов и средних глубин (до 600м). Настораживает правда отстуствие выводов для радиооборудования и тд - но приборное оснащение "Сайклопс-1" непрерывно менялось в зависимости от задач и целей миссии и потому оставим пока здесь критику. Работало. Для имевшихся условий и имевшихся возможностей обеспечения погружений.

Рассчитанный на погружение на глубину до 500м (1640 футов), аппарат водоизмещнием 9,1 тонна преимуществено эксплуатировался на глубинах не более 300-330 метров. Особую славу принесли рейды с коммерческими пассажирами к затонувшему на подходе к Нью-Йорку итальянскому пассажирскому лайнеру "Андреа Дориа"
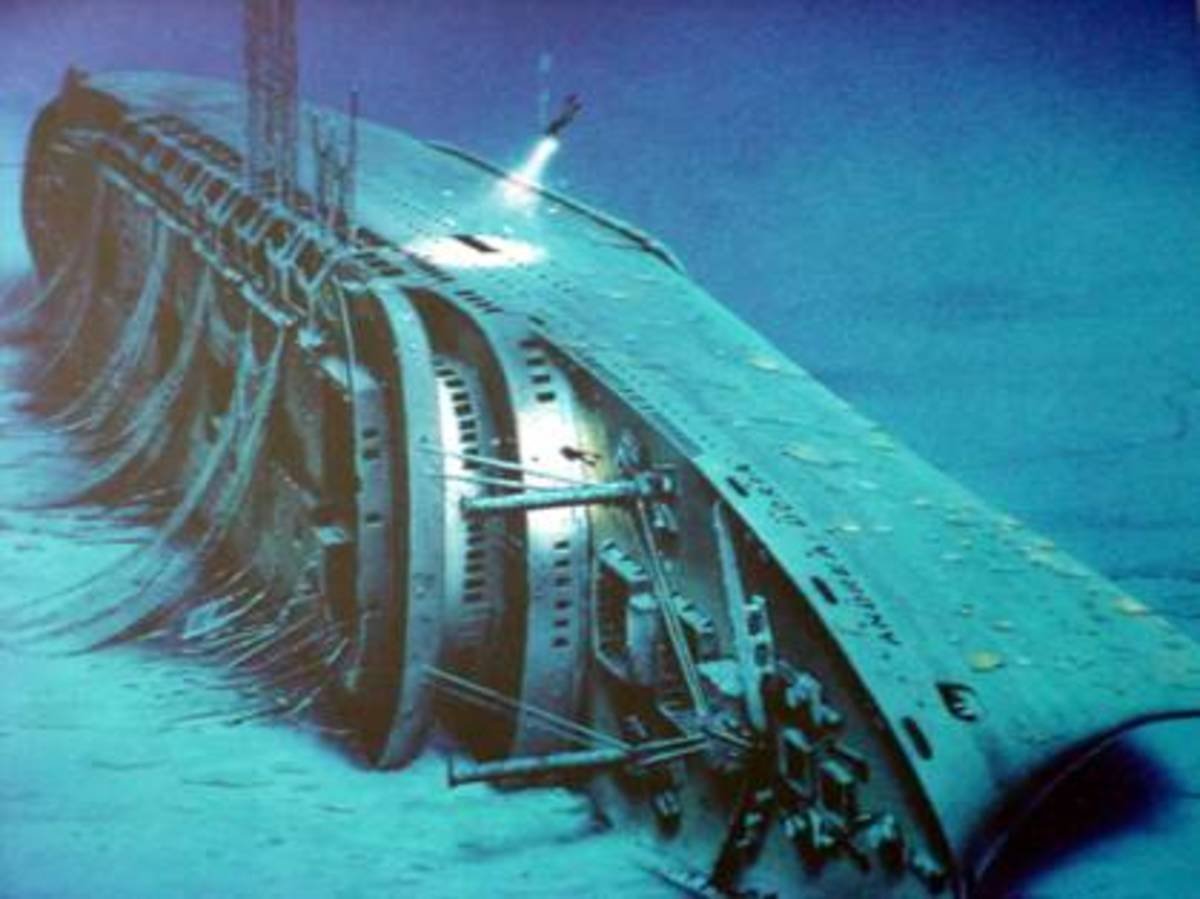
Благо лайнер лежит на глубине всего 73-75 метров и нагрузки на корпус подводного аппарата были далеки от предельных расчетных. Зато выяснилось что существует огромное количество энтузиастов желающих посмотреть на жертву знаменитного столкновения, и способных заплатить пару десятков тысяч долларов за такое удовольствие.
Аппарат "Циклопс -1" оказался вполне маневренным (4 электродвигателя обеспечивали ему скорость около 3,5 узлов) что позволяло ему маневрировать даже в условиях подводного течения. Кроме коммерческих развлекательных погружений - аппарат с успехом использовался для научных исследований, на него навешивалось оборудование отбора проб воды на разных глубинах, буи и зонды и тд. В 2018-2019м году он крайне успешно провел исследования экологического состояния бухты Сан-Хуан и пролива Пьюджет Саунд (штат Вашингтон, Тихоокеанское побережье США) беря на глубину 280-300м четырех научных сотрудников и приличный груз аппаратуры.
В целом в эксплуатации "Сайклопс" находился до 2022 года, не исчерпал своего ресурса и сейчас установлен как экспонат в музее. При этом он вполне годен для погружений.

На волне успехов сразу после сдачи Циклопа-1 в коммерческую эксплуатацию (весна 2015 года) Стоктон Раш принимает решение взяться за проектирование Циклопа - 2 уже способного погружаться (по первым, предварительным расчетам) на глубины до 2000м - Стоктон Раш единоличный лидер компании и руководитель проектирования будущего "Титана". Об этой машине, ставшей третьим поколением подводных аппаратов по данной схеме в следующий раз.
Итак поговорим теперь о продолжении истории с подводными аппаратами
То,что "Антиподес" требуется смена не было ни для кого секретом. Решено было разрабатывать новый подводный аппарат в габаритах и возможностях совпадающий с старым - только новый.
"Антиподес" в его финанльной конфигурации полностью удовлетворял требованиям коммерческой эксплуатации - оставалось только повторить его на новом технологическом уровне.
Он стал первой самостоятельной разработкой фирмы OceanGate
Его разработку вели совместно с лабораторией Вашингтонского университета, и он оказался вполне успешной конструкцией. Аппарат вошел в строй в 2015м году и был поначалу, плодом успешного сотрудничества Гильермо Сенляйна и Стоктона Раша. Однако именно при постройке этого аппарата разошлись пути "отцов-основателей" филмы, Гильермо (уволился в 2013м году и перешел к работе в области космонавтики) и Стоктона . Стоктон Раш требовал при проектировании делать упор на дешевизне и технологичности производства (предполагалось серийное производство), Сенляйн настаивал на обеспечении надежности и высоких эксплуатационных качеств.
Конфликт начался с выбора материала для цилиндрической оболочки прочного корпуса аппарата - вместо проверенных стальных сплавов, Раш, имевший опыт сотрудничества с фирмой Боинг по разработке деталей из стекловолокна предлагал стекловолоконную трубу (приблизительно 160 слоев углеродного волокна суммарной толщиной около 40 мм) к которой крепился стальной сферический люк с одной стороны и прочная акриловая полусфера (подобная той, что была на модернизированном "Антиподес".Но это был только предварительный дизайн. НА деле "Сайклопс" был построен с стальным корпусом - просто в 2013м году появилась возможность заказать стальной цилиндр с нужными параметрами по очень выгодной цене. Раш который стремился сократить расходы счел необходимым сэкономить средства и это решение для "Циклопса-1" решение оказалось вполне рабочим и удачным. Оболочку из углепластика решили оставить для следующего аппарата. В общем хотел но не получилось и слава богу. Дополнительную плавучесть аппарату придавали спрятанные под легкой обшивкой попавки из синтактика (вспененного материала способного выдержать высокое давление, нечто подобное применил для своего батискафа "Деп Челлендеже" погружавшегося в Марианскую впадину Кэмерон) - вполне высокотехнологическое и оправдавшее себя решение.
Еще одно решение для первого Циклопа - применить джойстик от обычной компьютерной игровой приставки для управления аппаратом оказалось точно так же успешным.
И еще одно решение предложенное Рашем было достаточно спорным - он предложил отказаться от дифферентной системы - что бы управлять продольным креном аппарата при погружении и всплытии. Вместе общепринятой системы небольших цистерн куда закачиватся или перекачивается вода под давлением равным глубине погружения - балансировку аппарата при погружении стали осуществлять буквально гирями - подобным гирям от рычажных весов (в виде подковы) навешанными на балки "шасси" аппарата. Водолазы осуществлявшие контроль за погружением аппарата двигали эти грузики вдоль балки удиффрентовывая аппарат в горизонтальной плоскости. А в случае нужды, при погружениях дифферентовку осуществляли передвижением членов экипажа.
Это решение вызывыало бурное отторжение у профессиональных подводников (ибо не дает полноценного контроля за ситуацией пилоту подводного аппарата, вынуждая прибегать к методам балансировки принятой у дельтапланеристов, а так же делает зависимым успешное погружение и всплытие аппарата в нужном положении относительно воды от действий аквалангистов обеспечения). - но прокатило.
Приборное оборудование аппарата связывалось с внешним миром через две акриловые "командные сферы" - с разьемами для подключения кабелей для связи с аквалангистами, выходы на электромоторы и тд. Решение довольно традиционное для эпохи 1960х годов и средних глубин (до 600м). Настораживает правда отстуствие выводов для радиооборудования и тд - но приборное оснащение "Сайклопс-1" непрерывно менялось в зависимости от задач и целей миссии и потому оставим пока здесь критику. Работало. Для имевшихся условий и имевшихся возможностей обеспечения погружений.
Рассчитанный на погружение на глубину до 500м (1640 футов), аппарат водоизмещнием 9,1 тонна преимуществено эксплуатировался на глубинах не более 300-330 метров. Особую славу принесли рейды с коммерческими пассажирами к затонувшему на подходе к Нью-Йорку итальянскому пассажирскому лайнеру "Андреа Дориа"
Благо лайнер лежит на глубине всего 73-75 метров и нагрузки на корпус подводного аппарата были далеки от предельных расчетных. Зато выяснилось что существует огромное количество энтузиастов желающих посмотреть на жертву знаменитного столкновения, и способных заплатить пару десятков тысяч долларов за такое удовольствие.
Аппарат "Циклопс -1" оказался вполне маневренным (4 электродвигателя обеспечивали ему скорость около 3,5 узлов) что позволяло ему маневрировать даже в условиях подводного течения. Кроме коммерческих развлекательных погружений - аппарат с успехом использовался для научных исследований, на него навешивалось оборудование отбора проб воды на разных глубинах, буи и зонды и тд. В 2018-2019м году он крайне успешно провел исследования экологического состояния бухты Сан-Хуан и пролива Пьюджет Саунд (штат Вашингтон, Тихоокеанское побережье США) беря на глубину 280-300м четырех научных сотрудников и приличный груз аппаратуры.
В целом в эксплуатации "Сайклопс" находился до 2022 года, не исчерпал своего ресурса и сейчас установлен как экспонат в музее. При этом он вполне годен для погружений.
На волне успехов сразу после сдачи Циклопа-1 в коммерческую эксплуатацию (весна 2015 года) Стоктон Раш принимает решение взяться за проектирование Циклопа - 2 уже способного погружаться (по первым, предварительным расчетам) на глубины до 2000м - Стоктон Раш единоличный лидер компании и руководитель проектирования будущего "Титана". Об этой машине, ставшей третьим поколением подводных аппаратов по данной схеме в следующий раз.