(no subject)
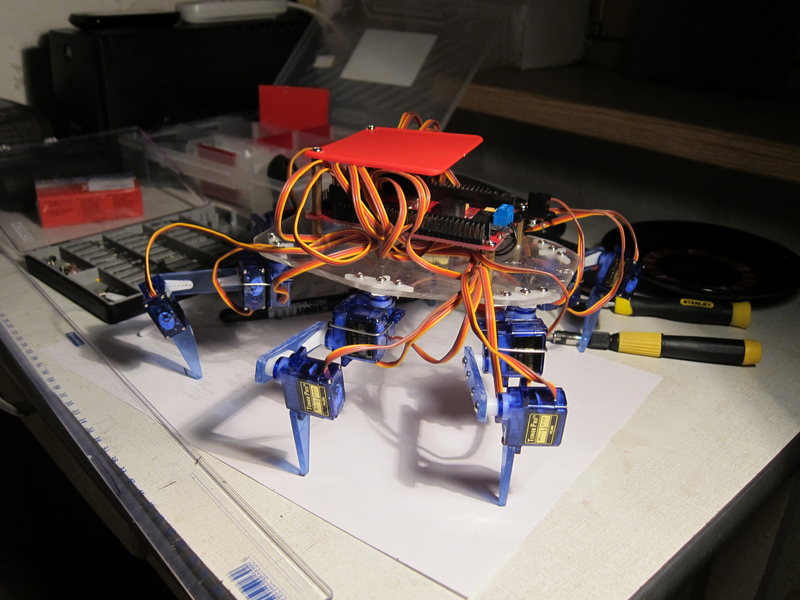
Много чего предстоит сделать, прежде чем мы дойдем до вот этой картинки:
Опуская росказни о том, как именно я пришел к мысли построить гексапода (это были тонны видео на ютубе), перейду сразу к процессу выбора деталек. Это был январь 2012-го. Я сразу знал, чего я хочу от своего робота, а чего - нет. Я хотел:
- каждая нога должна иметь 3 степени свободы - 3dof (3 dimensions of freedom). Потому что более простой вариант 2dof - не дает такого ощущения насекомого, а 4dof - излишне, 3dof и так позволяет свободно перемещать кончик ноги в 3д пространстве;
- 6 ног; снова-таки, это уже не 4 (тогда робот неуклюже скачет), но и еще и не 8, как у пауков и уже чрезмерно;
- небольшой;
- дешевый;
- минимум плат и соединений;
Первой конечно нужно было выбирать motherboard для крохи. Много как хорошего так и плохого успел почитать к тому времени об Arduino. Но именно на него и смотрел, как на основной вариант. Паять контроллеры самому - времени не было, а брать более продвинутые платы с ARM cpu, например - дорого, да и разбираться, как их программить, как работать с ШИМ выводами и т.п. А ардуина: IDE запустил, код напедалил, upload нажал - и привет, оно тебе уже моргает. Красота! ;)
Сначала я начал смотреть на arduino mega и клонов, т.к. кол-во ШИМ выходов, которыми можно рулить сервами у них было предостаточно. Напомню, что для 3dof гексапода нужно 3*6 = 18 сервов, и раздельных каналов управления ими. Но потом я нашел настоящий Яззь среди arduino mega, это плата от Dagu, звать которую Red Back Spider Controller. Вот она на ebay.
Она предлагает все свои выходы в виде готовых 3-х штырьков (земля, питание, сигнал), и разввязку по питанию. Питание самого контроллера стабилизировано, а на разъемы двиглов идет как есть (UPD: не как есть, а тоже стабилизированные 5 вольт. И повидимому развязано с питанием контроллера, т.к. помех в работу контроллера 18 одновременно работающих сервов не вносят). Это позволяет просто подать на клемму питания 7-30 вольт достаточной мощности (питальника от eee pc 901 на 12В и 3А - оказалось достаточно для жужжания всеми 18 сервами) и не морочить голову с раздельным питанием логики и двиглов. Также это позволит в будущем легко посадить все это чудище на пачку Li-Po аккумуляторов на 7.4 вольт. И при всем этом, с программной точки зрения - это обычная ардуино мега, совместимая с софтом и либами, да и железом (кроме шилдов, устанавливающихся прямо на оригинальную mega - они не покатят). Правда цена еще выше чем даже оригинальная мега, но все остальные плюсы перевесили это.
Далее сервоприводы. На ebay по запросу micro servo их много разных. Я взял самые мощные из самых маленьких и дешевых, весом 9 грамм, пластмассовыми редукторами. Если брать лоты где их пачками шлют - выходит дешевле. Я брал 3 пачки по 6 кажется, и вышло меньше $2 штука. Забегая вперед, скажу, что жалею что не потратил больше и не взял сервы с металлическими шестернями и шариковыми подшипниками. У этих пластмассовых оказались довольно заметные люфты, и характерный хруст при чрезмерном усилии когда шестерни проскакивают. Из-за люфтов - кинематику довольно тяжело настроить точно (да это вообще самое тяжелое оказалось).
Вот собственно и все что я заказал, с доставкой это вышло примерно $100. Батарейки и передатчики\приемники для контроля и радиоуправляемости - оставил на потом. Потому что радиоуправляемая машинка у меня есть и не интересна, а что меня действительно интересовало - это ноги! Видео плавно ходящих гексаподов на ютубе - завораживало, я смотрел его, пересматривал, и каждый раз слезы котились по щекам, и я сдавлено хрипел «хочу!». Хочу не заказать такую готовую штуку, а хочу сделать самому что-нибудь такое!
Пока ждал заказа, читал, как же просвященные люди оживляют свои творения. Конечно сразу же всплылаинверсная кинематика (перевод). Если сказать просто и сразу про шарнитные «конечности», то прямая кинематика - это когда на вход подаются углы шарниров, а на выходе мы имеем модель конечности в пространстве, и координаты крайней точки конечности. Обратная же кинематика - очевидно работает наоборот - на вход поступают координаты крайней точки конечности, куда нам надо дотянуться, а на выходе мы получаем углы, на которые нужно повернуть шарниры, чтобы это осуществить. Сервоприводы как раз получают на вход угловое положение, в которое им нужно повернуться (по одному сигнальному проводу, закодированное ШИМ / PWM).
Начал писать. Начал с того, о чем читал: продумывать реализацию ИК по методу, описанному там. Но быстро пришло ощущение, что для моего случая он чрезмерно сложен. Причем как громоздок в реализации, так и вычислительно очень сложен - расчет идет итеративно. А у меня 6 ног, для каждой из которых нужно считать ИК, и всего 16Мгц не самой шустрой архитектуры AVR. Но и всего 3 степени свободы. И несложно догадаться, что до произвольной точки в «области дотягивания» можно дотянуться только одним способом. Решение уже созрело в голове.
Код тут в тексте уже не привожу, он слишком элементарен, и я в конце приведу ссылки на полную версию всех сорцов - заодно научусь пользоваться github.
Последовательность шага выбрал простую - 3 ноги на земле, 3 - в воздухе переставляются. Таким образом, координаты ног относительно их default положения - можно разделить на 2 группы. Для этих двух групп я и проворачивал шаг в цикле (см функцию walk() в Buggy.ino). А в итоге, каждая нога вычисляла себе свою индивидуальную координату, исходя из своей default координаты.
И он пошел! Но пока только вперед. На ноги надел ему резинки, чтобы не так скользил на линолеуме. И бросился снимать это на видео, чтобы показать друзьям.
До а-пода, конечно, далеко. Но я же не закончил еще .)
Попедалил еще вечер - и добавил возможность двигаться в любом направлении (но не поворачивая корпус .)). Плюс для сглаживания между движениями добавил функцию (smoothTo()), которая аккуратно перемещает ноги (поднимая вверх, опять в 2-х группах, одна из которых всегда внизу, тварь на ней стоит, пока другая поднимается и перемещается) в новое положение. Это нужно чтобы тварь не дергала резко ногами, сменяя направление движения (этой фичи ох как не хватает многим игровым персонажам прошлых лет). И он резво забегал в любом направлении - вбок, по диагонали:
Оба грандиозных файла сорцов можно смотреть тут. Даю ссылку на конкретную ревизию, на момент написания этого текста. Так как в дальнейшем все может стать совсем иначе.
Результаты, которые пока можно выделить:
- склепать самому гексапода - дело выполнимое;
- написать ему кинематику самому с нуля - тоже вполне под силу любому (разработчику);
- бюджет может быть минимальным, единственное, на что действительно необходимо тратиться - это сервоприводы; а так, если есть паяльник, то можно любым микроконтроллером обойтись; чем удобнее, тем дороже, впрочем;
- на сервах лучше не экономить, но и самые дешевые - работают;
- такого удовольствия от программирования я не испытывал с 9-ти лет, когда впервые увидел на компьютерном кружке zx spectrum и научился писать первые программки для него; это так кайфово, когда твой код не просто где-то работает и чего-то там кому-то показывает, а бегает прямо перед тобой и пугает кошку.
Впереди более продвинутые алгоритмы для плавного перемещения тела, ну и беспроводное управление и батареи, конечно же.
Опуская росказни о том, как именно я пришел к мысли построить гексапода (это были тонны видео на ютубе), перейду сразу к процессу выбора деталек. Это был январь 2012-го. Я сразу знал, чего я хочу от своего робота, а чего - нет. Я хотел:
- каждая нога должна иметь 3 степени свободы - 3dof (3 dimensions of freedom). Потому что более простой вариант 2dof - не дает такого ощущения насекомого, а 4dof - излишне, 3dof и так позволяет свободно перемещать кончик ноги в 3д пространстве;
- 6 ног; снова-таки, это уже не 4 (тогда робот неуклюже скачет), но и еще и не 8, как у пауков и уже чрезмерно;
- небольшой;
- дешевый;
- минимум плат и соединений;
Первой конечно нужно было выбирать motherboard для крохи. Много как хорошего так и плохого успел почитать к тому времени об Arduino. Но именно на него и смотрел, как на основной вариант. Паять контроллеры самому - времени не было, а брать более продвинутые платы с ARM cpu, например - дорого, да и разбираться, как их программить, как работать с ШИМ выводами и т.п. А ардуина: IDE запустил, код напедалил, upload нажал - и привет, оно тебе уже моргает. Красота! ;)
Сначала я начал смотреть на arduino mega и клонов, т.к. кол-во ШИМ выходов, которыми можно рулить сервами у них было предостаточно. Напомню, что для 3dof гексапода нужно 3*6 = 18 сервов, и раздельных каналов управления ими. Но потом я нашел настоящий Яззь среди arduino mega, это плата от Dagu, звать которую Red Back Spider Controller. Вот она на ebay.
Она предлагает все свои выходы в виде готовых 3-х штырьков (земля, питание, сигнал), и разввязку по питанию. Питание самого контроллера стабилизировано, а на разъемы двиглов идет как есть (UPD: не как есть, а тоже стабилизированные 5 вольт. И повидимому развязано с питанием контроллера, т.к. помех в работу контроллера 18 одновременно работающих сервов не вносят). Это позволяет просто подать на клемму питания 7-30 вольт достаточной мощности (питальника от eee pc 901 на 12В и 3А - оказалось достаточно для жужжания всеми 18 сервами) и не морочить голову с раздельным питанием логики и двиглов. Также это позволит в будущем легко посадить все это чудище на пачку Li-Po аккумуляторов на 7.4 вольт. И при всем этом, с программной точки зрения - это обычная ардуино мега, совместимая с софтом и либами, да и железом (кроме шилдов, устанавливающихся прямо на оригинальную mega - они не покатят). Правда цена еще выше чем даже оригинальная мега, но все остальные плюсы перевесили это.
Далее сервоприводы. На ebay по запросу micro servo их много разных. Я взял самые мощные из самых маленьких и дешевых, весом 9 грамм, пластмассовыми редукторами. Если брать лоты где их пачками шлют - выходит дешевле. Я брал 3 пачки по 6 кажется, и вышло меньше $2 штука. Забегая вперед, скажу, что жалею что не потратил больше и не взял сервы с металлическими шестернями и шариковыми подшипниками. У этих пластмассовых оказались довольно заметные люфты, и характерный хруст при чрезмерном усилии когда шестерни проскакивают. Из-за люфтов - кинематику довольно тяжело настроить точно (да это вообще самое тяжелое оказалось).
Вот собственно и все что я заказал, с доставкой это вышло примерно $100. Батарейки и передатчики\приемники для контроля и радиоуправляемости - оставил на потом. Потому что радиоуправляемая машинка у меня есть и не интересна, а что меня действительно интересовало - это ноги! Видео плавно ходящих гексаподов на ютубе - завораживало, я смотрел его, пересматривал, и каждый раз слезы котились по щекам, и я сдавлено хрипел «хочу!». Хочу не заказать такую готовую штуку, а хочу сделать самому что-нибудь такое!
Пока ждал заказа, читал, как же просвященные люди оживляют свои творения. Конечно сразу же всплылаинверсная кинематика (перевод). Если сказать просто и сразу про шарнитные «конечности», то прямая кинематика - это когда на вход подаются углы шарниров, а на выходе мы имеем модель конечности в пространстве, и координаты крайней точки конечности. Обратная же кинематика - очевидно работает наоборот - на вход поступают координаты крайней точки конечности, куда нам надо дотянуться, а на выходе мы получаем углы, на которые нужно повернуть шарниры, чтобы это осуществить. Сервоприводы как раз получают на вход угловое положение, в которое им нужно повернуться (по одному сигнальному проводу, закодированное ШИМ / PWM).
Начал писать. Начал с того, о чем читал: продумывать реализацию ИК по методу, описанному там. Но быстро пришло ощущение, что для моего случая он чрезмерно сложен. Причем как громоздок в реализации, так и вычислительно очень сложен - расчет идет итеративно. А у меня 6 ног, для каждой из которых нужно считать ИК, и всего 16Мгц не самой шустрой архитектуры AVR. Но и всего 3 степени свободы. И несложно догадаться, что до произвольной точки в «области дотягивания» можно дотянуться только одним способом. Решение уже созрело в голове.
Код тут в тексте уже не привожу, он слишком элементарен, и я в конце приведу ссылки на полную версию всех сорцов - заодно научусь пользоваться github.
Последовательность шага выбрал простую - 3 ноги на земле, 3 - в воздухе переставляются. Таким образом, координаты ног относительно их default положения - можно разделить на 2 группы. Для этих двух групп я и проворачивал шаг в цикле (см функцию walk() в Buggy.ino). А в итоге, каждая нога вычисляла себе свою индивидуальную координату, исходя из своей default координаты.
И он пошел! Но пока только вперед. На ноги надел ему резинки, чтобы не так скользил на линолеуме. И бросился снимать это на видео, чтобы показать друзьям.
До а-пода, конечно, далеко. Но я же не закончил еще .)
Попедалил еще вечер - и добавил возможность двигаться в любом направлении (но не поворачивая корпус .)). Плюс для сглаживания между движениями добавил функцию (smoothTo()), которая аккуратно перемещает ноги (поднимая вверх, опять в 2-х группах, одна из которых всегда внизу, тварь на ней стоит, пока другая поднимается и перемещается) в новое положение. Это нужно чтобы тварь не дергала резко ногами, сменяя направление движения (этой фичи ох как не хватает многим игровым персонажам прошлых лет). И он резво забегал в любом направлении - вбок, по диагонали:
Оба грандиозных файла сорцов можно смотреть тут. Даю ссылку на конкретную ревизию, на момент написания этого текста. Так как в дальнейшем все может стать совсем иначе.
Результаты, которые пока можно выделить:
- склепать самому гексапода - дело выполнимое;
- написать ему кинематику самому с нуля - тоже вполне под силу любому (разработчику);
- бюджет может быть минимальным, единственное, на что действительно необходимо тратиться - это сервоприводы; а так, если есть паяльник, то можно любым микроконтроллером обойтись; чем удобнее, тем дороже, впрочем;
- на сервах лучше не экономить, но и самые дешевые - работают;
- такого удовольствия от программирования я не испытывал с 9-ти лет, когда впервые увидел на компьютерном кружке zx spectrum и научился писать первые программки для него; это так кайфово, когда твой код не просто где-то работает и чего-то там кому-то показывает, а бегает прямо перед тобой и пугает кошку.
Впереди более продвинутые алгоритмы для плавного перемещения тела, ну и беспроводное управление и батареи, конечно же.