Роботы становятся безопаснее благодаря софт-роботике
Современные роботы в большинстве случаев не назовешь мягкими и пушистыми. Их механизмы в основном сделаны из металла, пусть даже наружная обшивка бывает пластиковой или из других искуственных материалов. Пожать руку такому роботу сегодня решится не каждый, - не факт, что робот способен различить, что оказалось в его манипуляторе - стальная плита весом в десятки килограмм или мягкая рука человека. Новое направление - это использование так называемой софт роботики. Как ожидается, это повысит безопасность общения с роботами, а также их ловкость и гибкость использования.
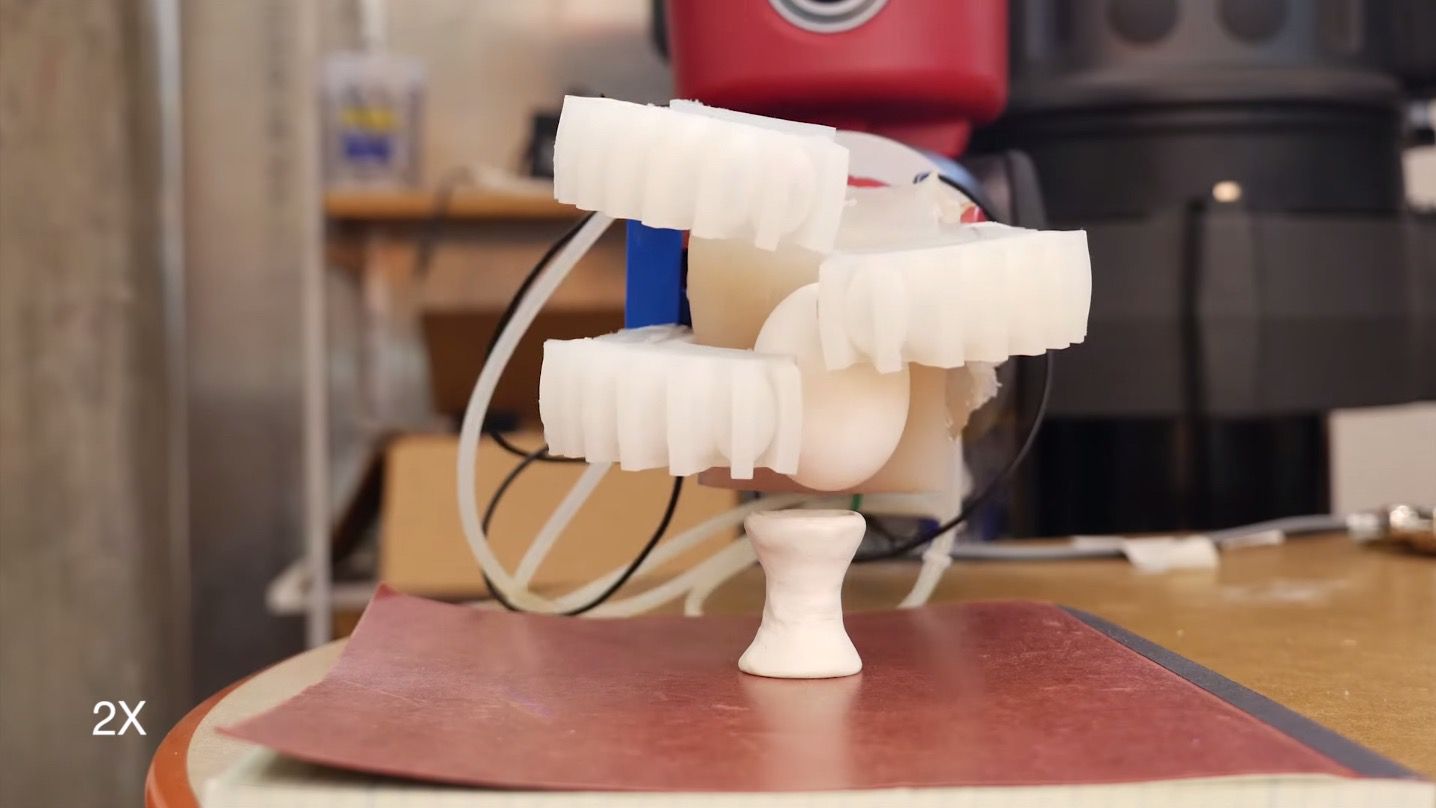
В лаборатории Computer Science and Artificial Intelligence Lab, Массачусетского технологического университета создали манипулятор для робота, позволяющий захватывать и перемещать хрупкие объекты, не повреждая их. Детали захвата, который поставили на промышленного робота Baxter, Rethink Robotics, напечатаны на 3D-принтере из силикона. В захват вмонтированы сенсоры, которые помогают роботу идентифицировать захватываемый объект. Благодаря этому робот может брать предметы, такие как яйцо, бумажный стаканчик или очки, не сломав и не разбив их. Захват снабжен пневматическими поршнями, которые управляют воздушными камерами в пальцах, позволяя им расширяться и сжиматься, что и определяет, с каким усилием робот будет брать и удерживать тот или иной предмет.

Мягкий захват, разработанный в MTI. Источник фото: qz.com
Мягкие захваты еще и очень ловкие - они способны взять один лист бумаги или карандаш, в отличие от большинства роботов с металлическими захватами. Разработчики опубликовали исследование, посвященное новому модульному мягкому захвату, PDF.
Разработчики роботов все чаще обращаются к теме софт-роботов.
Источник: qz.com
В лаборатории Computer Science and Artificial Intelligence Lab, Массачусетского технологического университета создали манипулятор для робота, позволяющий захватывать и перемещать хрупкие объекты, не повреждая их. Детали захвата, который поставили на промышленного робота Baxter, Rethink Robotics, напечатаны на 3D-принтере из силикона. В захват вмонтированы сенсоры, которые помогают роботу идентифицировать захватываемый объект. Благодаря этому робот может брать предметы, такие как яйцо, бумажный стаканчик или очки, не сломав и не разбив их. Захват снабжен пневматическими поршнями, которые управляют воздушными камерами в пальцах, позволяя им расширяться и сжиматься, что и определяет, с каким усилием робот будет брать и удерживать тот или иной предмет.
Мягкий захват, разработанный в MTI. Источник фото: qz.com
Мягкие захваты еще и очень ловкие - они способны взять один лист бумаги или карандаш, в отличие от большинства роботов с металлическими захватами. Разработчики опубликовали исследование, посвященное новому модульному мягкому захвату, PDF.
Разработчики роботов все чаще обращаются к теме софт-роботов.
Источник: qz.com