Огурцы стремятся в космос, часть третья.

Снова олдфажная пикча для привлечения внимания.
Третий пункт нашей космической программы - сборка и запуск аналога "Союза", а также отработка парных полётов и стыковка (создание экспериментальной космической станции). Как водится - в начале небольшая историко-техническая справка:
Космический корабль "Союз" создавался под конкретную задачу: доставка космонавтов на Луну. Однако попутно прорабатывались решения для создания на его основе военных кораблей, а позже, с вводом в строй космических станций, на основе "Союза" был создан корабль снабжения "Прогресс".
Вкратце перечислю отличия "Союза" от предшествующего ему "Востока" (и промежуточных "Восходов"):
- Корабль имел большой запас автономности и комфорта благодаря отдельному бытовому отсеку и солнечным батареям, снабжающим корабль энергией.
- Вместимость корабля - до трёх членов экипажа. Конечно, "Восходы" могли вмещать троих космонавтов, но без скафандров, и это всё равно была тесная консерва.
- Корабль мог полноценно маневрировать, у него имелись двигатели причаливания и ориентации, а также сближающе-корректирующий двигатель.
- Корабль имел стыковочную аппаратуру, и мог осуществлять стыковку в автоматическом и ручном режимах. Именно на "Союзах" была произведена первая автоматическая стыковка, а также стыковка двух управляемых кораблей.
- Спускаемый аппарат корабля мог осуществлять управляемый спуск (баллистический неуправляемый спуск оставался в качестве аварийного варианта), с парашютной посадкой. В метре от земли на спускаемом модуле срабатывали посадочные двигатели, обеспечивающие мягкую посадку. Также аппарат мог совершать посадку на воду (по крайней мере соответствующие испытания проводились).
Несмотря на то, что три лётных испытания прототипов корабля выявили множество недостатков (ни один полёт не закончился успешно), четвёртый полёт был предпринят пилотируемым, и привёл к гибели космонавта Владимира Комарова (при посадке не вышел основной парашют и скрутился запасной). Через четыре года в "Союзе-11" из-за разгерметизации погибли ещё трое космонавтов (Волков, Добровольский, Пацаев), но с тех пор аварий пилотируемых "Союзов" больше не было, а сам "Союз" считается одним из надёжнейших кораблей, и, претерпев многочисленные модификации, используется до сих пор. На текущий момент только Россия и Китай имеют свои пилотируемые корабли, причём китайский "Шеньчжоу" - практически калька "Союза".
Выводился же "Союз" одноименной модификацией всё той же королёвской "семёрки", отличающейся от прежних более совершенными двигателями РД-0110.
Воссоздадим корабль.

Во-первых, вспомним, что "Союз" состоит из трёх отсеков: посадочного, обитаемого и инструментального. Посадочный - маленький и тесный, в нём, в специальных креслах, располагаются космонавты при взлёте и посадке. Он оснащён системой управляемого спуска, парашютной системой и реактивными посадочными двигателями.
Трёх кербонавтов может нести только модуль Mk1-2. По характеристикам он больше похож на капсулу "Аполлона" (т.е. является и взлётным, и жилым, и посадочным), и вполне самодостаточен - но отыгрывать, так отыгрывать. Используем его.

Второй модуль - обитаемый, чьё назначение понятно из названия; также он использовался как шлюз для выхода в космос и имел стыковочный модуль. Поскольку другого трёхместного модуля у нас всё равно нет - используем ещё один Mk1-2.

Конечно, лучше не соединять их "ёлочкой". Переворачиваем с помощью клавиши W посадочный модуль на 180 градусов по горизонтали, а клавишей Q (или E) вращаем его так, чтобы лестницы модулей совпали. Соединяем через декуплер (декуплер тоже надо развернуть, иначе после рассоединения он останется прикреплён к посадочному модулю, добавляя ему лишний вес).

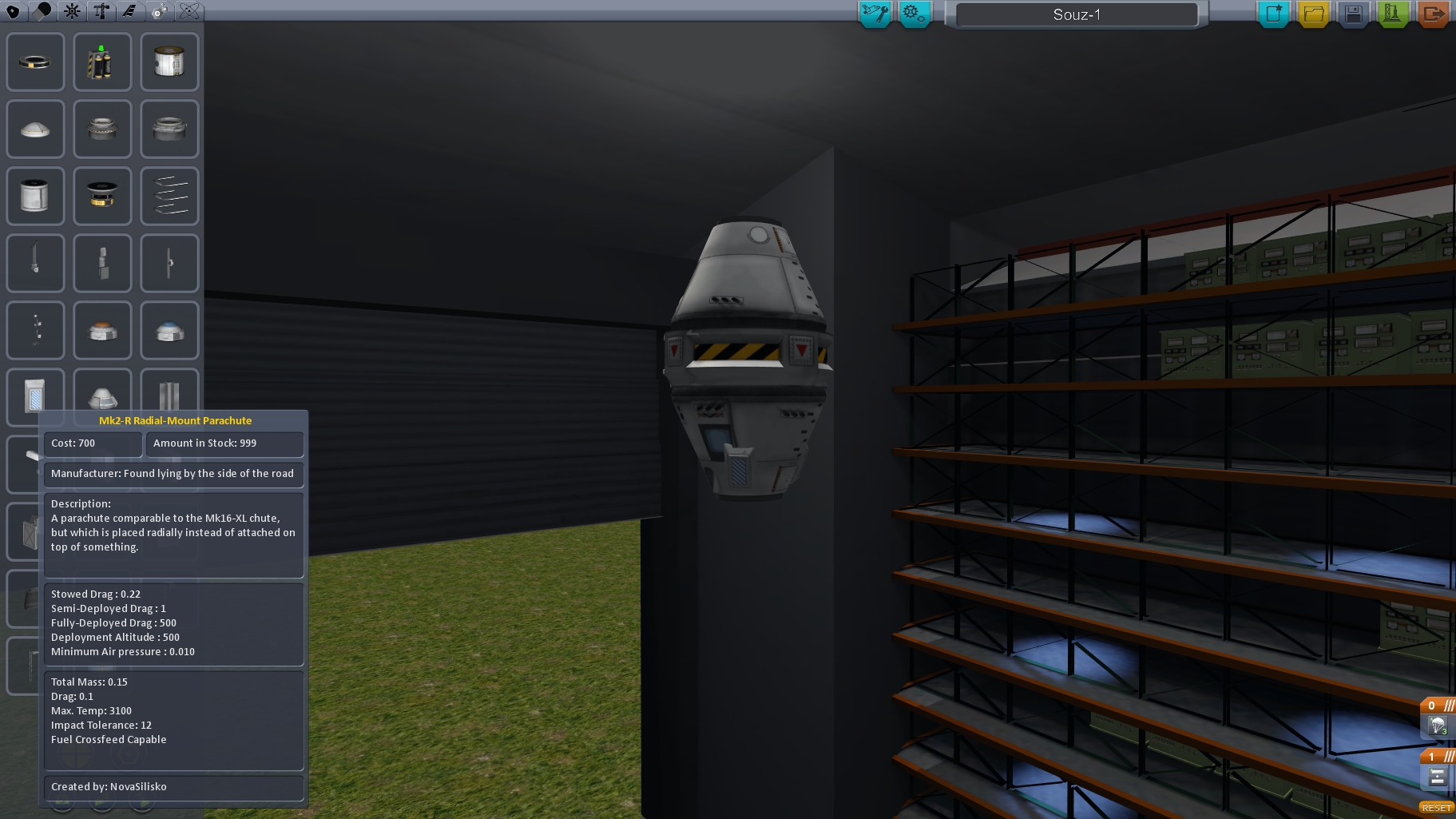
Посадочному модулю понадобятся парашюты. Поскольку верхняя и нижняя стороны у него заняты, используем радиально крепящиеся Mk2-R, трёх штук достаточно. Поскольку модуль будет садиться широким основанием вниз, то парашюты надо перевернуть и закрепить ближе к узкому основанию.
Реактивная система посадки? Ну пусть будет, благо у нас есть маленькие твёрдотопливные ускорители Sepratron-1, словно специально созданные для такой задачи. Твердотопливные ускорители отличаются от жидкостных тем, что не могут регулировать тягу, после поджига выдавая постоянный импульс вплоть до выгорания топлива. Sepratron-1 работают девять секунд, выдавая реактивную силу в 20 кН. Поставим четыре перевёрнутых соплами вверх сепратрона у широкого основания модуля. При наличии парашютов система реактивной посадки несколько избыточна, но может использоваться в аварийных ситуациях.
Далее - обитаемый отсек. Снабдим его стыковочным узлом - это будет Clamp-O-Tron Shielded Docking Port. Он отличается от обычного кламп-о-трона наличием защитной крышки, которая, в закрытом состоянии, будет выступать в качестве обтекателя.

И, раз уж мы предусматриваем стыковку, нам понадобятся прожекторы для освещения объектов и антенна для межкорабельной связи. Используем Illuminator Mk1 (а лучше - пару) и антенну из уже знакомого нам семейства Communotron (я, для пущей схожести с оригиналом, приладил её на небольшой инженерный пилончик).


Инструментальный модуль - это уже известные нам ASAS+RCS, к которым добавится двигательная установка. Поскольку корабль получается больше в диаметре, чем "Восток", то и модули используем большеразмерные.

Топливный бак нам нужен совсем небольшой, Rockomax X200-8. Несмотря на компактный размер, из-за большего диаметра он вмещает столько же топлива, сколько FL-T800.

В качестве двигателя можно бы было воспользоваться экономичным LV-909, но тогда у нас будут проблемы с переходником под носитель (а он у нас будет отличаться размером от прежних). Потому используем Rockomax Poodle.

Инструментальный модуль крепится к посадочному через декуплер, и есть вероятность, что крепление это может оказаться не очень надёжным. Потому используем встроенную разработчиками уступку ньютоновской физике - инженерное крепление EAS-4 Strut Connector. Оно представляет из себя совершенно невообразимое в реальных условиях прочностное крепление, усиливающее соединение между двумя соединёнными им частями. Забегая вперёд, скажу, что благодаря струтам можно добиваться устойчивости от совершенно нереальных конструкций, которые по всем законам физики должны бы рассыпаться под собственным весом.

И последнее, что есть у "Союза" - раскрывающиеся солнечные панели. Gigantor XL Solar Array подойдут идеально, ставим две панели на инструментальный блок.

Вот такой получился корабль.
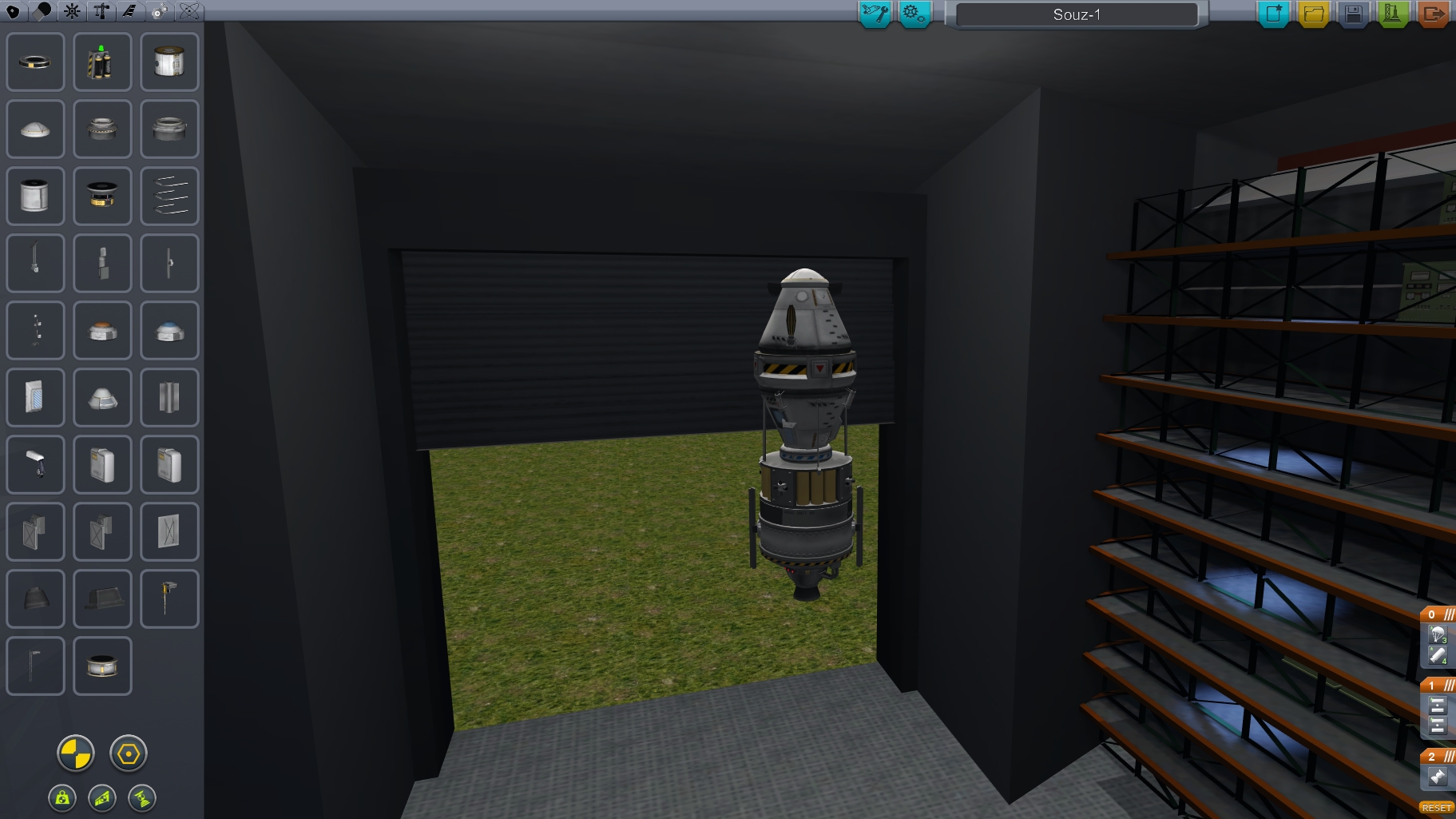
Он гораздо больше и тяжелее нашего "Востока", потому прежнего носителя, даже с новыми ступенями, для его вывода на орбиту уже не хватит. Потому используем баки и двигатели большего диаметра (в том числе "джумбы" - Rockomax Jumbo-64, самые большие баки в ванильной версии), сохраняя прежнюю трёхступенчатую компоновку ракеты. Единственное небольшое отличие компоновки - дополнительно соединяем ступени меж собой струтами: поскольку вес ступеней большой, крепления декуплеров уже не обеспечивают нужной жёсткости. Если вы выполняли сборку предыдущих ракет, то собрать эту не составит труда, и процесс сборки я пропущу. В итоге должно получиться что-то вроде этого:

Отлаживаем последовательность запуска (я поставил реактивную посадочную систему перед раскрытием парашюта, на случай, если придётся использовать её как ТДУ), и отправляем ракету на старт.
Перед стартом позволю себе снова ненадолго вернуться в прошлое: первый пилотируемый полёт "Союзов" предполагал сразу парный полёт со стыковкой (вслед за первым кораблём должен был отправиться второй, с тремя космонавтами). Но из-за проблем полёта первого корабля старт второго отменили, тем самым спася жизнь его экипажу.
Мы же готовы жертвовать огурцами во имя науки выполним намеченную тогда программу: полёт будет парным, и, по возможности - со стыковкой. Ручной - автоматическая тоже возможна, но какой в ней интерес?

Обратите внимание: из-за того, что наш основной модуль перевёрнут, NavBall также оказывается перевёрнут. Вектор и антивектор на нём поменялись местами, но в остальном - всё точно так же. Ситуацию мы поправим после выхода на орбиту, сейчас же следует следить за двигателем: из-за иных параметров ракеты стартовую тягу надо устанавливать на 2/3 от максимального, и постепенно доводить до максимума, следя, однако, за перегревом. При достижении красной полосы перегрева двигатели попросту взорвутся, потому необходимо найти такую мощность, на которой перегрев будет лишь чуть ниже максимального.

В полёте ракету будет колбасить пуще прежнего, но если укрепили всё, как следует - опасаться нечего.


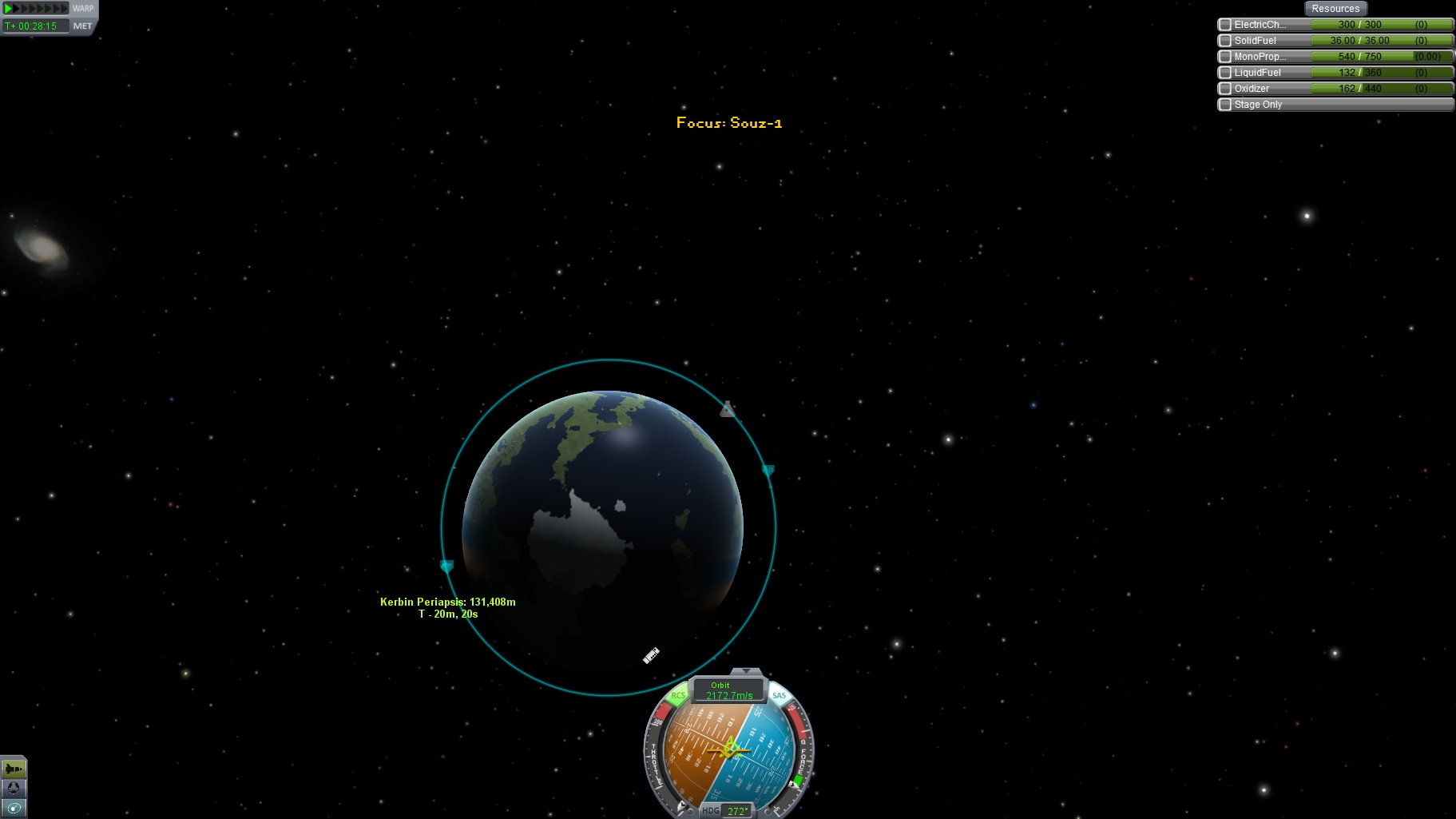
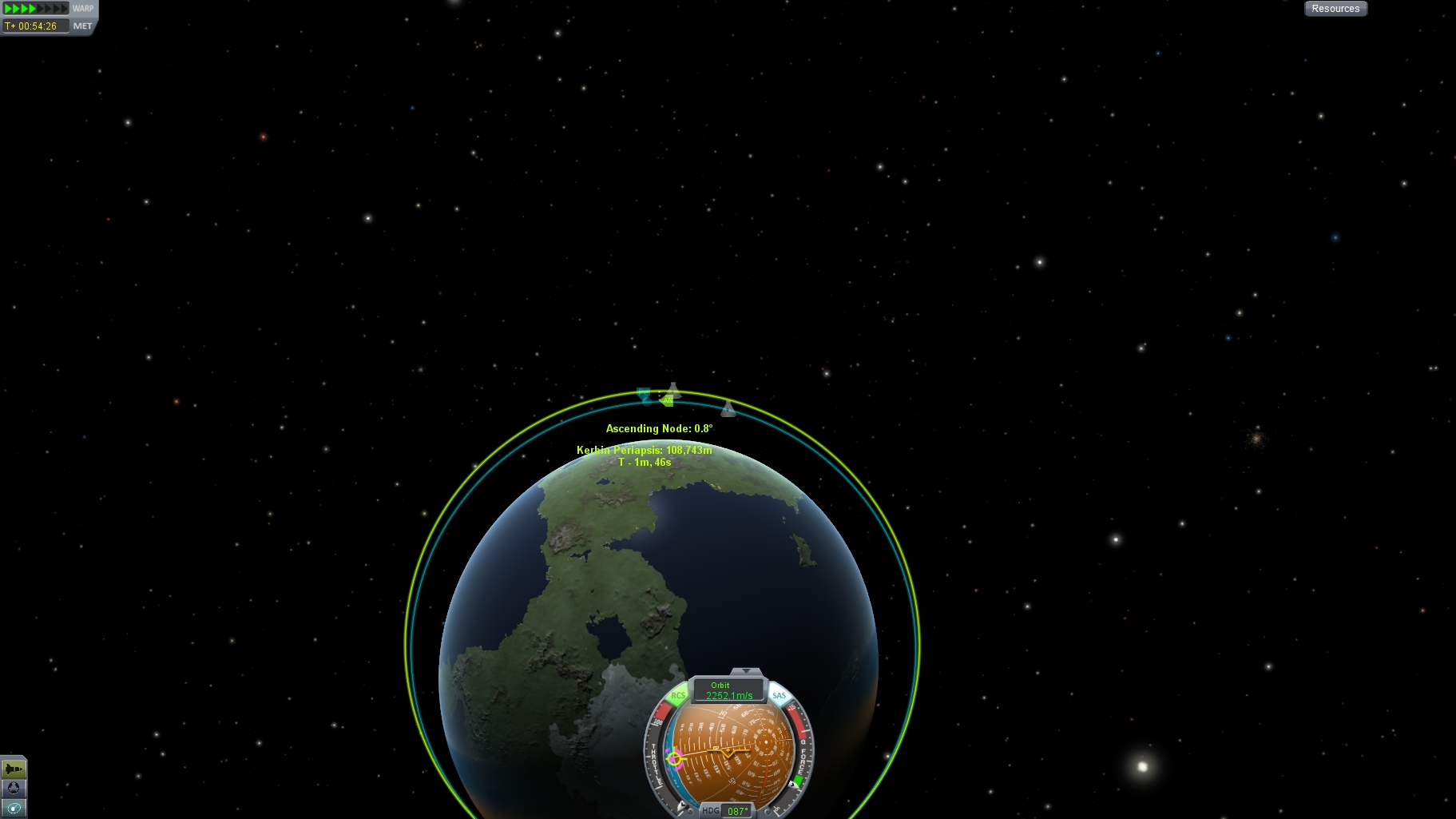
Из-за задуманной стыковки орбиту надо делать а) как можно более низкой (безопасная высота, на которой не будет ощутимого торможения об атмосферу - где-то 100 - 110 км) б) как можно более округлой - для облегчения синхронизации орбит двух "Союзов". Мне удалось добиться более-менее ровной орбиты a143/p131 истратив больше полубака топлива "Союза-1".
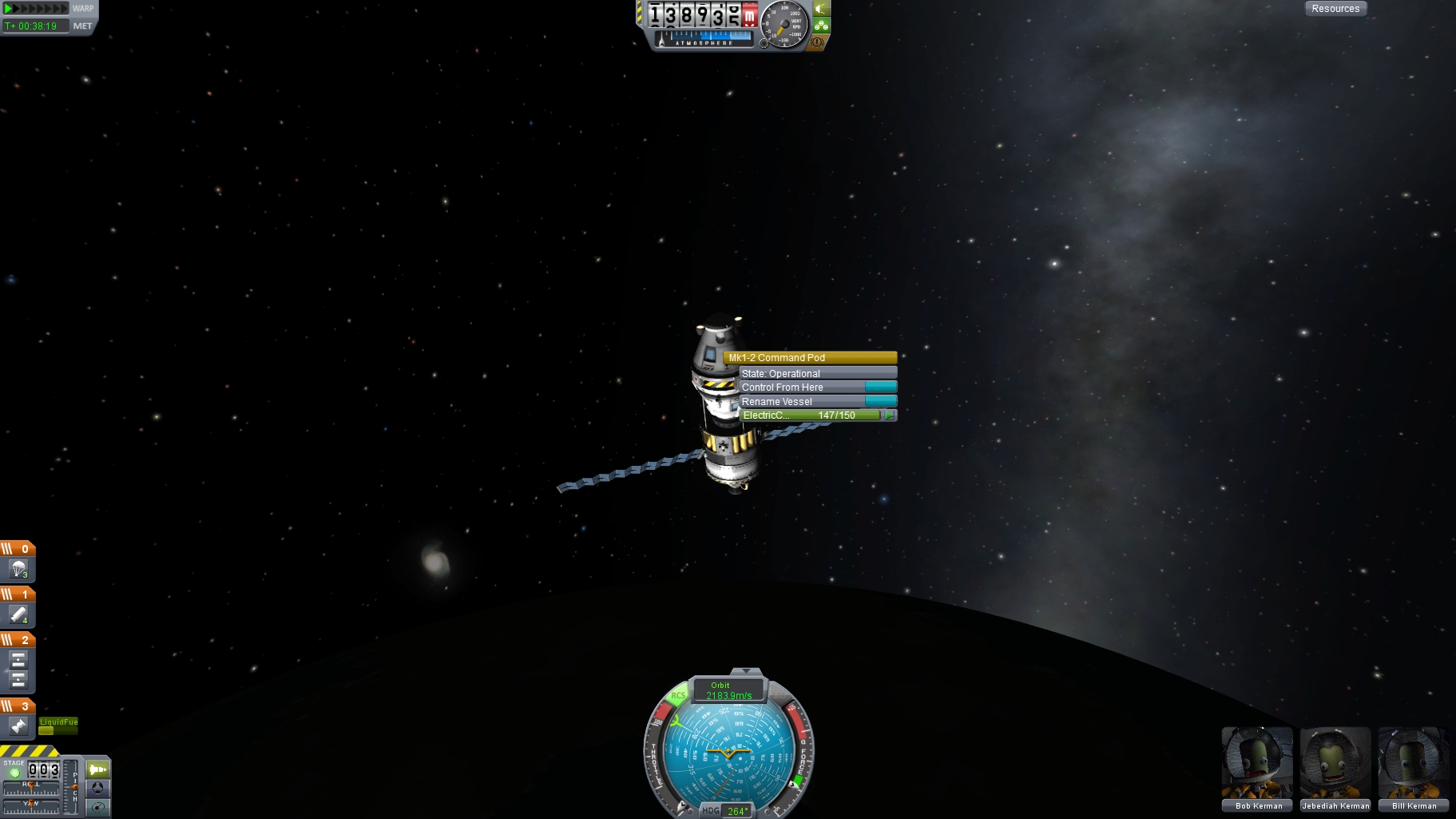
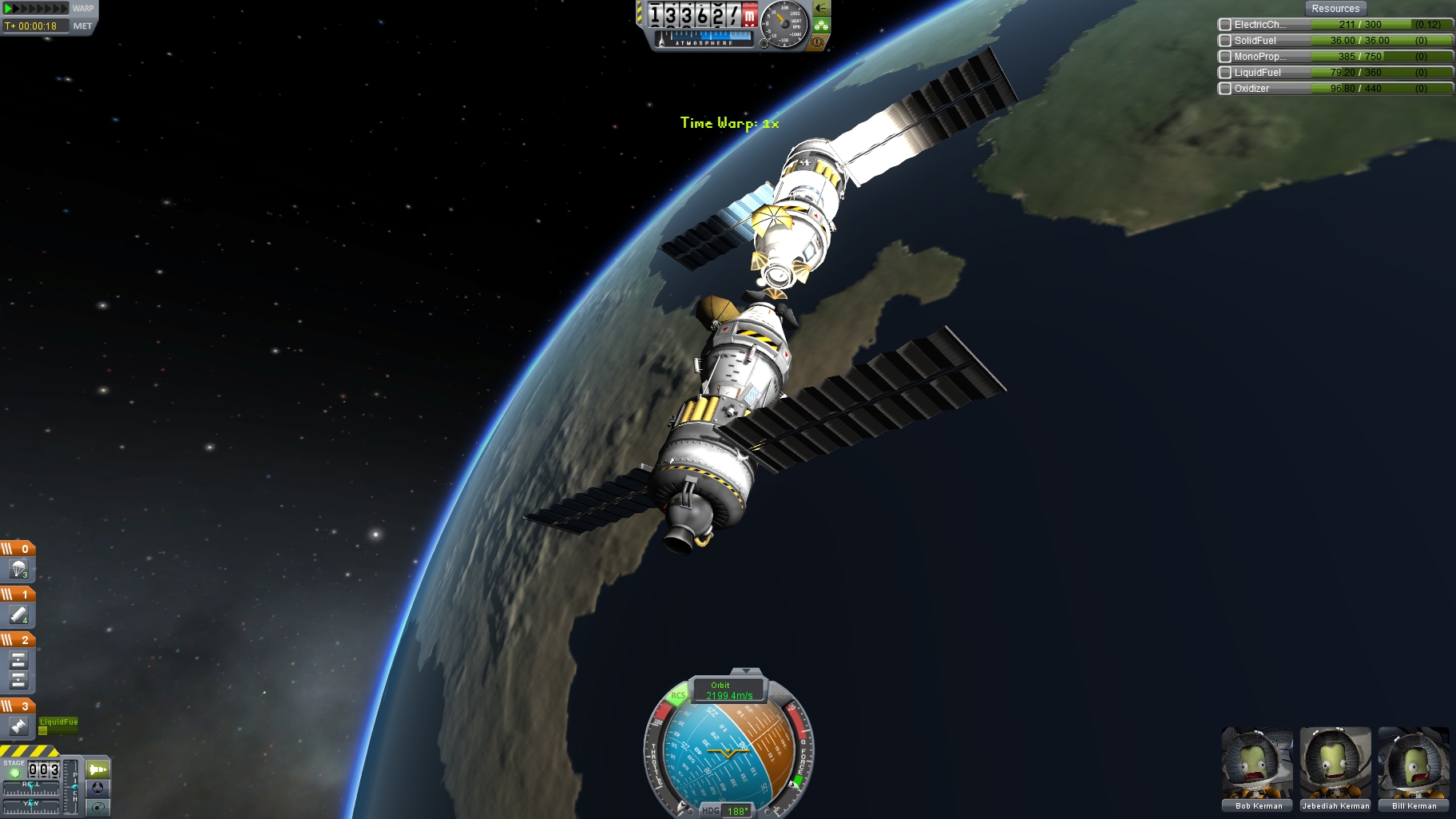
Раскроем солнечные панели.
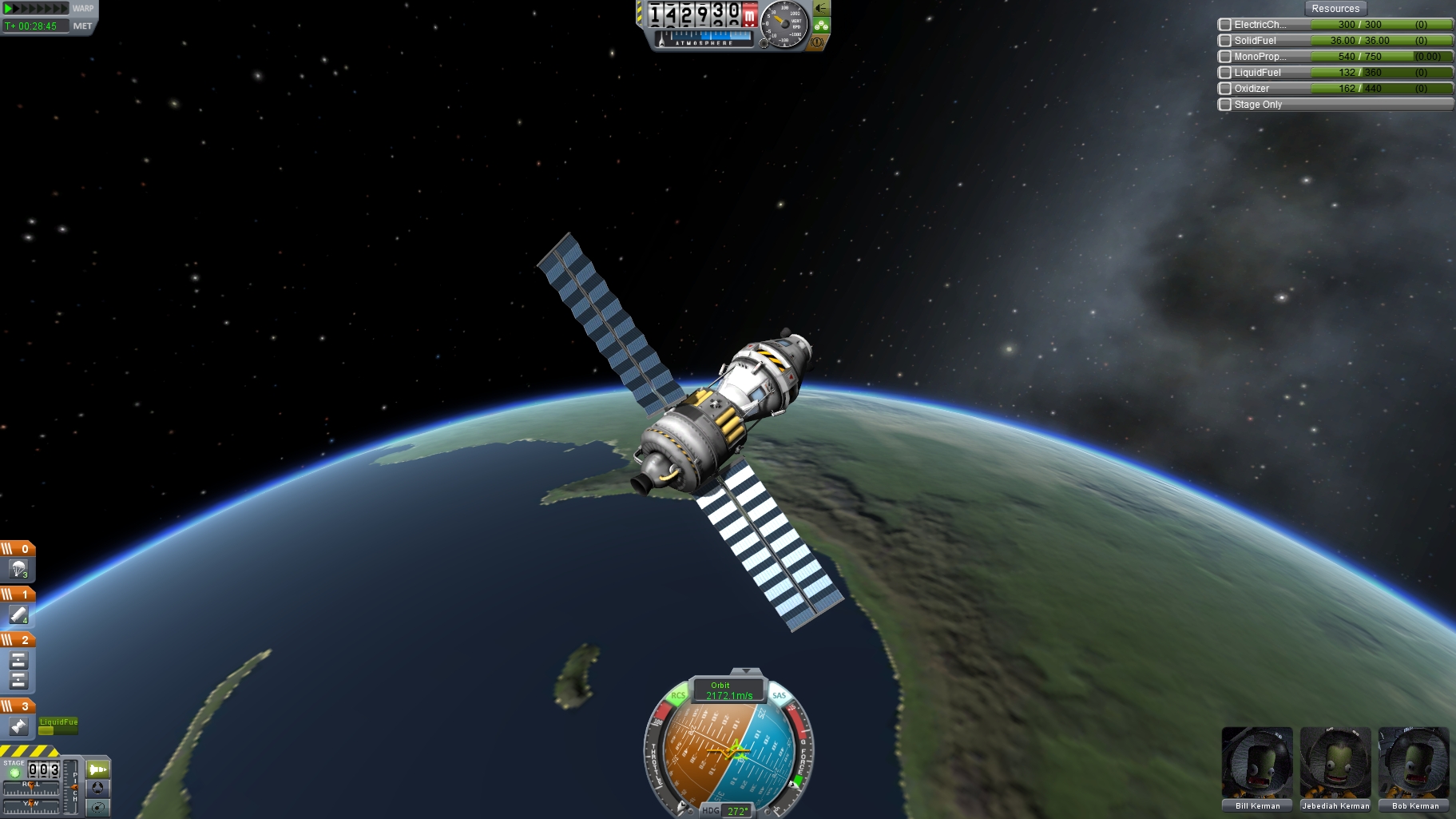
Автоматическая ориентация панелей на Солнце работает. Если раскрыть панель Resources, и включить прожекторы (клавиша U), можно видеть, как снижается заряд аккумуляторов (ElectricCharge) на тёмной стороне Кербала, и как восстанавливается на светлой.
Но нам надо переселить кербонавтов в жилой отсек. Увы, из-за того, что они у нас не имеют прямой стыковки, переход из отсека в отсек возможен только через открытый космос. Ну, тем интереснее!

Раскроем-ка, кстати, антенну.

Кривовато, но сойдёт.

Остальные огурцы переселяются в жилой модуль без особых проблем. Билл даже решил сфотографировать "Союз" издалека, и вдоволь насладился свободным полётом, истратив почти всё топливо, за что получил нагоняй от Джеба. Сначала - партзадание, а развлекаться будем потом!
После переселения огурцов в жилой модуль, вызываем на нём меню и выбираем пункт "Control from here". Теперь управление кораблём ведётся из жилого модуля, и NavBall принимает привычную ориентацию.
К этому моменту корабль уже почти завершил первый виток. Пора запускать второй корабль - чтобы сэкономить топливо на маневр сближения. Это действительно важно: топлива хватит не на такое большое количество попыток. В реальности первая ручная стыковка "Союзов" сорвалась и из-за того что космонавт не следил как следует за расходом топлива (хотя основная причина была в неверной ориентации корабля по крену).
Чтобы начать второй полёт, не прекращая первого, нажмите Esc и выберите Space Center.
Пуск и вывод на орбиту ничем не отличаются от первого (более того - из-за глюка игры даже члены экипажа в кораблях оказались одни и те же), опущу их, и перейду к самому интересному.
Поскольку мы запускаем корабли ровно по экватору, нам не нужно беспокоиться о наклонении орбит. Всё, что нужно сделать - это как можно точнее совместить радиус орбит. Самая очевидная техника: при выводе второго корабля остановить вертикальное ускорение тогда, когда апогей его орбиты совпадёт с орбитой первого корабля. Приближаясь к апогею, придать кораблю горизонтальное (относительно Кербала) ускорение. Из-за неточностей ручного выполнения маневра орбиты точно не совпадут, потому на втором-третьем витке нужно будет поднимать/опускать апогей/перигей (для этого нужно давать в соответствующих точках орбиты импульс по вектору и антивектору соответственно - можете поэкспериментировать перед стыковкой).

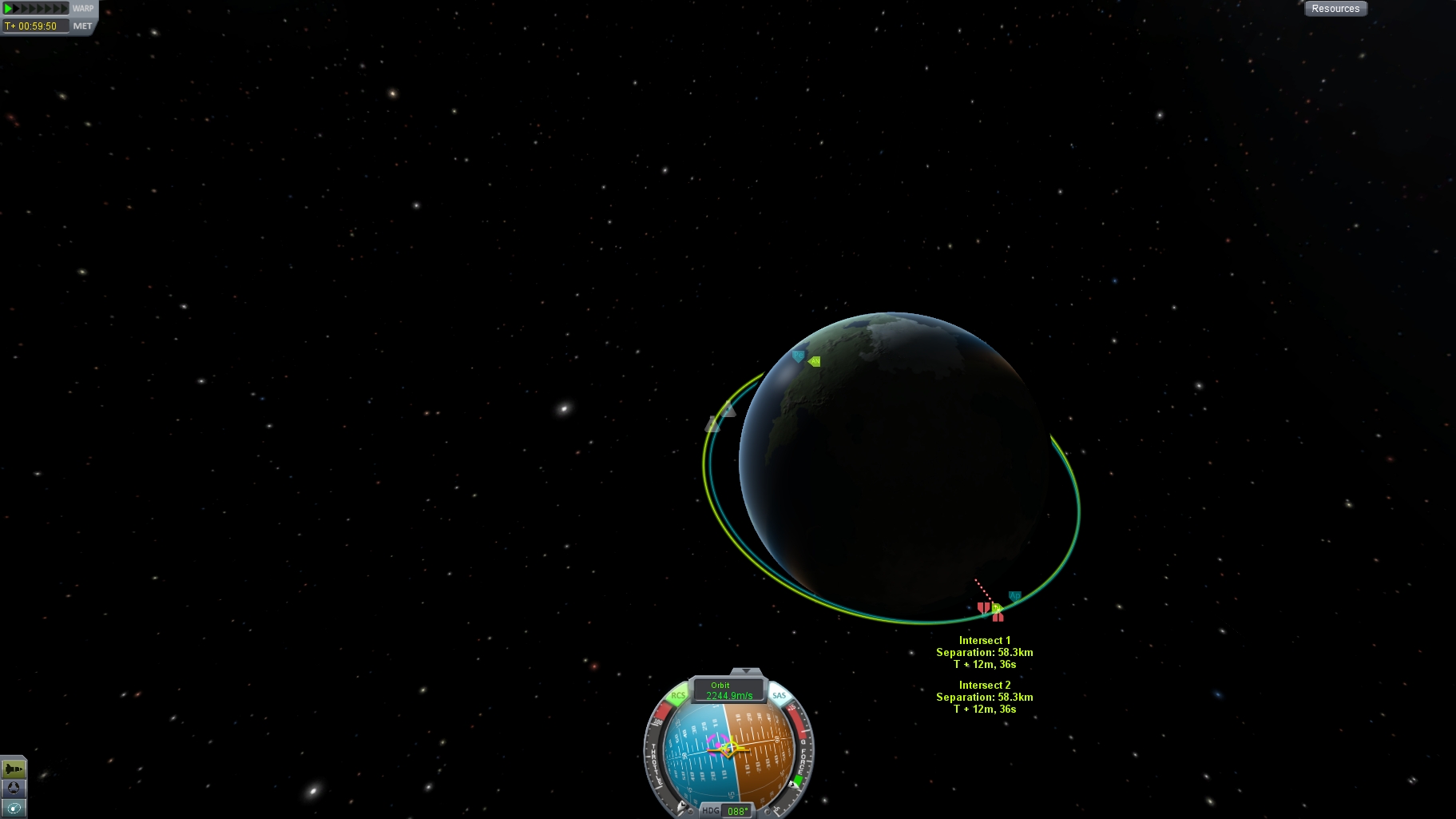
На орбитальной карте выберите объект стыковки, и нажмите Set as target. Карта тут же покажет маркеры наибольшего сближения с целью




Собственно, для стыковки нужно не только подвести корабли друг к другу, но и добиться того, чтобы они двигались с одинаковой скоростью. Но, раз их орбиты почти одинаковы, то в одной и той же точке орбит, скорости так и так будут одинаковыми. Проблема в том, что если вы не запустили второй корабль с идеальной точностью (а я, например, не запустил), то между кораблями будет некоторое расстояние (дельта в 182 километра отставания в моём случае).
В космосе нельзя вот так просто взять и увеличить скорость для того, чтобы догнать какой-то объект на орбите - при увеличении скорости ваша орбита сместится. Что делать? Нужно изменить орбиту текущего витка так, чтобы пройти расстояние на дельту меньше (в случае отставания) или на дельту больше (в случае опережения), и на следующем витке снова выровнять орбиту. Маркеры сближения помогут отследить корректность выполнения маневра - как только они совпадут, первую часть маневра можно завершать. Не спускайте орбиту слишком низко, чтобы не затормозить об атмосферу! Для экономии топлива можно изменить орбиту чуть-чуть, и подвести корабли друг другу не за один виток, а за два или даже за три.
На первом витке я снизил дельту до 53 км, затем, подрегулировав орбиту, добился синхронизации с дельтой в 1,8 км на втором витке.

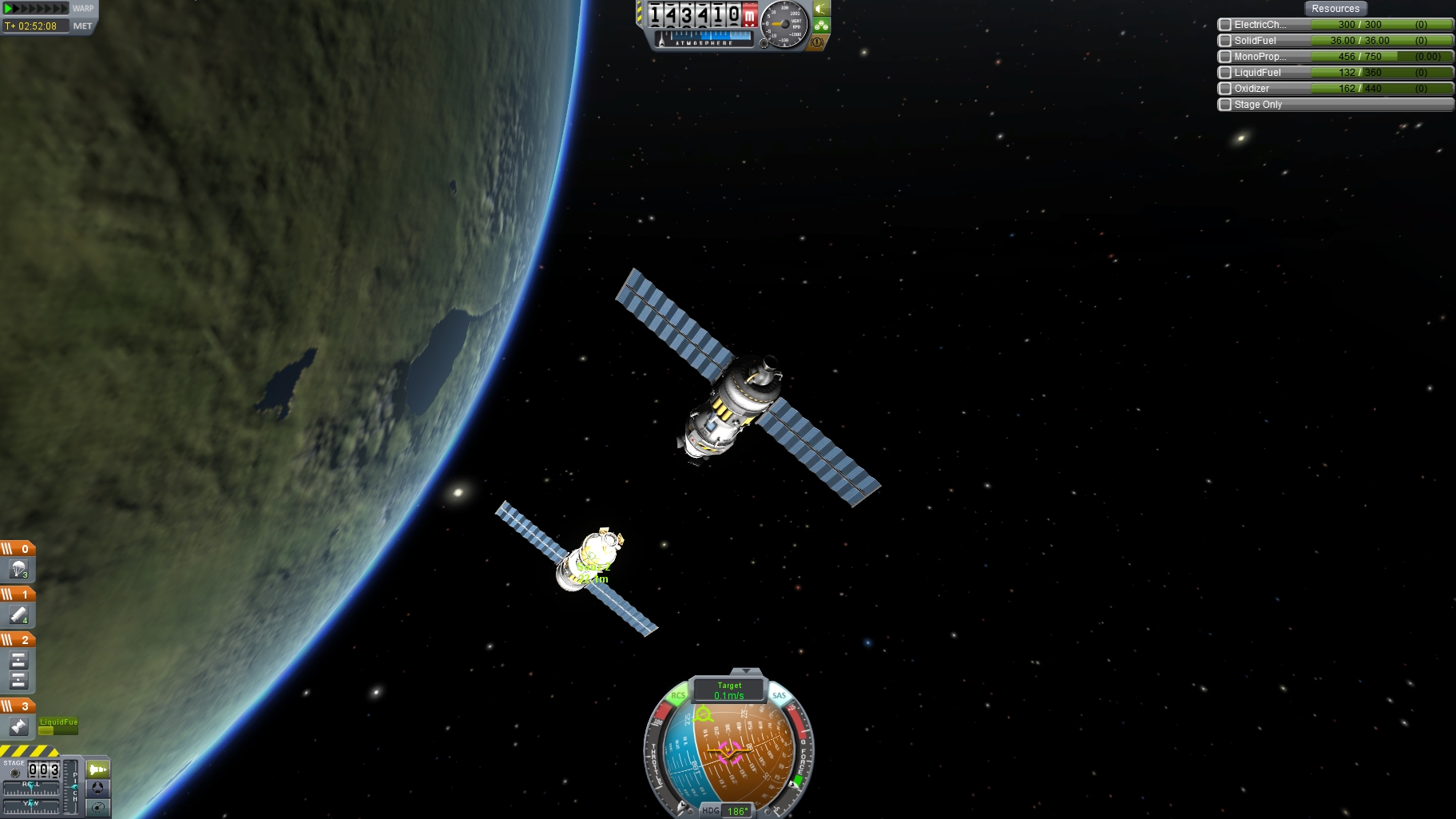
Относительная скорость меж кораблями - 41,5 м/сек. Серией малых импульсов двигателя снижаю скорость до 1,5 м/сек и понемногу корректирую курс так, чтобы векторы скоростей кораблей совпадали (вектор скорости цели обозначен на NavBall розовым индикатором). Хинт: для более точного маневрирования включите Caps Lock. После выравнивания векторов на орбитальной карте видно, что наименьшее расстояние меж кораблями будет всего сто метров. В этой точке нужно ещё раз выровнять орбиты, тогда уже можно маневрировать с помощью RCS.

Маневрирование RCS работает через клавиши HNIJKL, нас интересуют прежде всего H (импульс ускорения) и N (импульс торможения), остальные клавиши выдают импульсы по двум другим координатным осям. Подводим корабли друг к другу.



Поскольку бак с монопропеллантом (топливо для RCS) у нас большой, то особенно заботиться об его окончании не стоит. К тому же маневры выполняются на скоростях в десятки сантиметров в секунду, и топлива на них уходит очень мало.
Орбиты и скорости синхронизированы идеально. Прожекторы освещают первый корабль. Открываем на "Союзе-2" защитную крышку стыковочного узла.

Переключаемся на второй (клавиша ] или через Tracking Station), открываем стыковочный узел на нём. Ну и фонарики зажигаем.

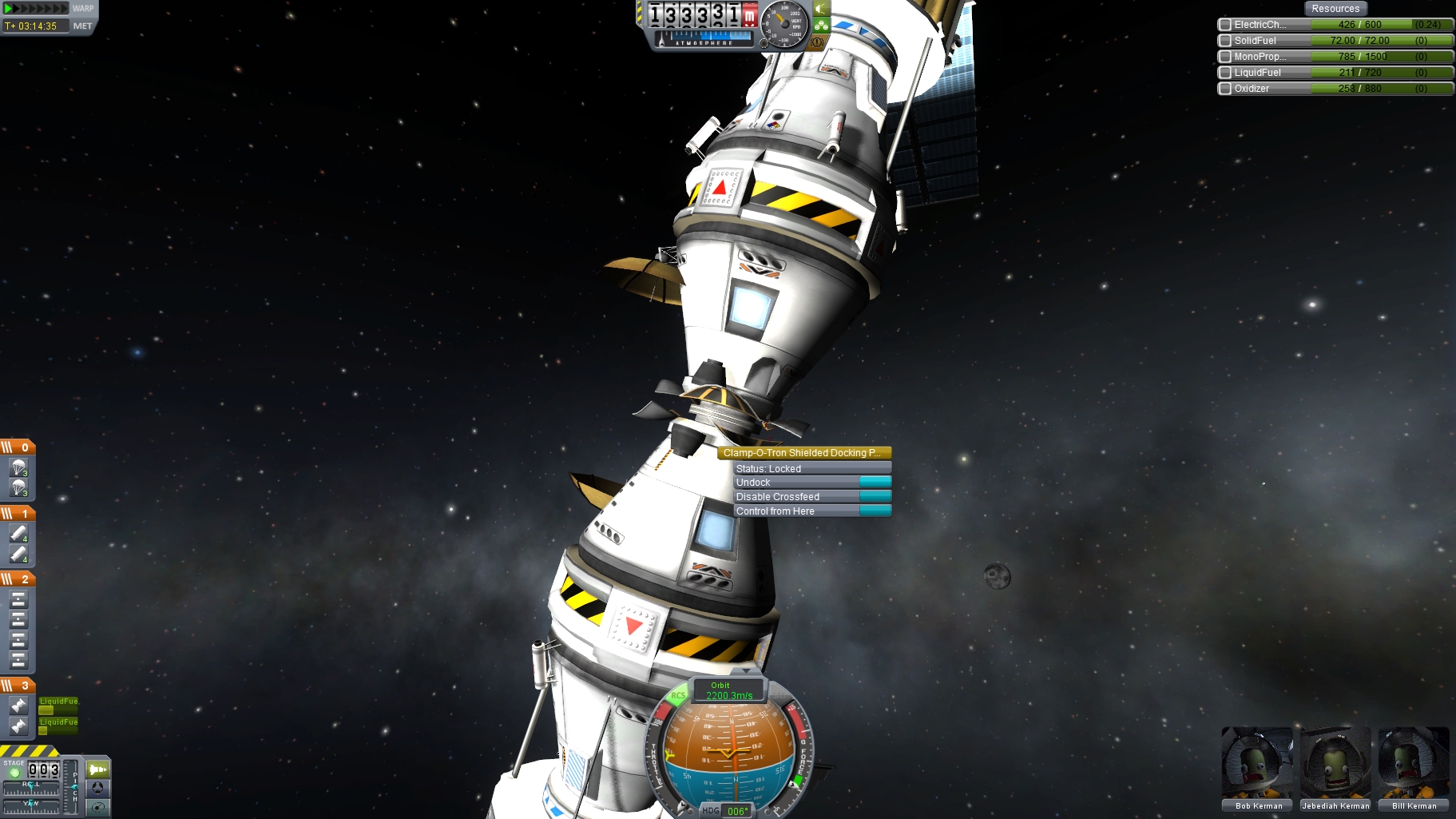
Начинаем стыковку. Стыковать будем "Союз-1" к "Союзу-2", для этого выбираем на втором "Союзе" стыковочный порт, и отмечаем "Set as target". Подводим корабли как можно ближе друг к другу, выравниваем их нос к носу. Операция, сами понимаете, достаточно деликатная, вряд ли получится с первого раза. Придётся подруливать клавишами IJKL, нивелируя малейшее отклонение по любой из координат. Если честно, у меня это тоже не с первого раза получилось, так что F5 - F9 нам в помощь.


Хорошо хотя бы, что стыковочные порты адрогинные - то есть "бесполые". Первые стыковочные устройства, что у нас, что в США, делились на "маму" и "папу" - конус и штырь. И всё бы ничего, летали бы и стыковались "папой" в "маму", но когда дело дошло до программы "Союз - Аполлон" идеологи всполошились: это кому-то надо быть "мамой", то есть находиться заведомо в менее привилегированном положении! Специально под эту программу разработали универсальный "бесполый" порт, потомки которого использовались вплоть до МКС.
При стыковке важно, чтобы угол отклонения портов друг от друга был как можно меньше. Градусов 5-10 стыковочная автоматика ещё компенсирует, но не больше. В общем, как в том анекдоте про лилипутский секс - тютелька в тютельку. У игры есть ещё какой-то режим стыковки, но какой от него прок - не очень понятно, все свои стыковки я делал в обычном режиме.


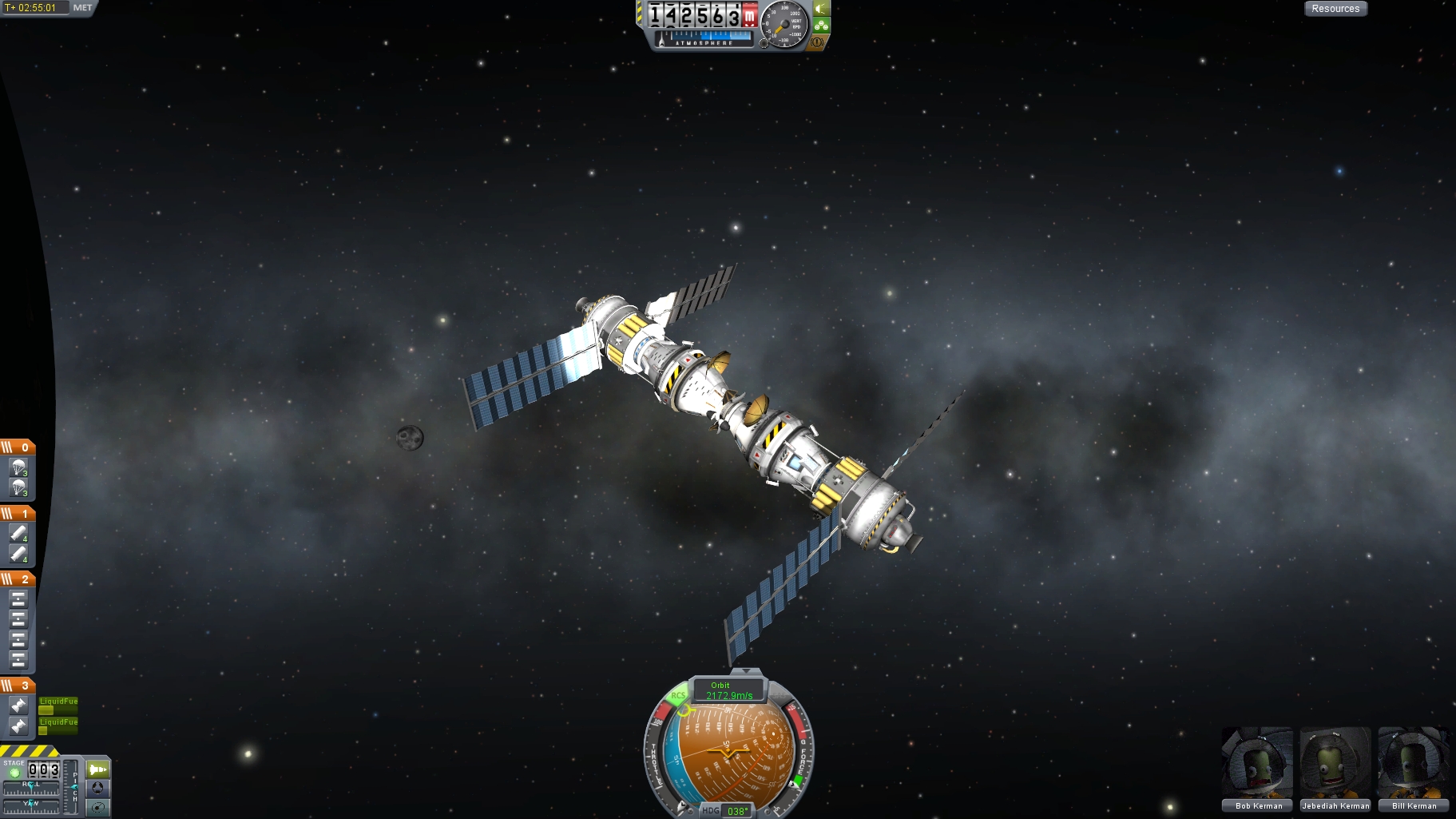
Получилось!
На орбите экспериментальная станция "Союз". Обратите внимание - ступени кораблей объединились, так что стыковка - это ещё и способ построения вундервафель прямо на орбите.
Можно оставить станцию летать так, а можно завершить программу, спустив корабли на Кербин.
Расстыковка - клик на стыковочном узле -> "Undock". Отводим корабль, тормозим двигателем и всё, как в прошлый раз (не забудьте пересадить кербонавтов в посадочный модуль, а то хана им!).
Билл и тут отличился - решил напоследок слетать к парному кораблю.


Домой!

Чёрт, как я и предполагал, топлива во втором "Союзе" на контролируемое торможение не хватило. Садиться, не пойми где, не очень-то хочется, потому отделяем посадочный модуль и даём импульс посадочными движками, используя их в качестве ТДУ.


Помогло не очень =)
Спуск. Похоже, не избежать нам купания.


Раскрытие парашютов и приводнение.


Первый "Союз", в котором осталось больше топлива, удаётся посадить на сушу. Прямо в полёте я меняю порядок срабатывания ступеней, чтобы парашют вышел до поджига посадочных двигателей.


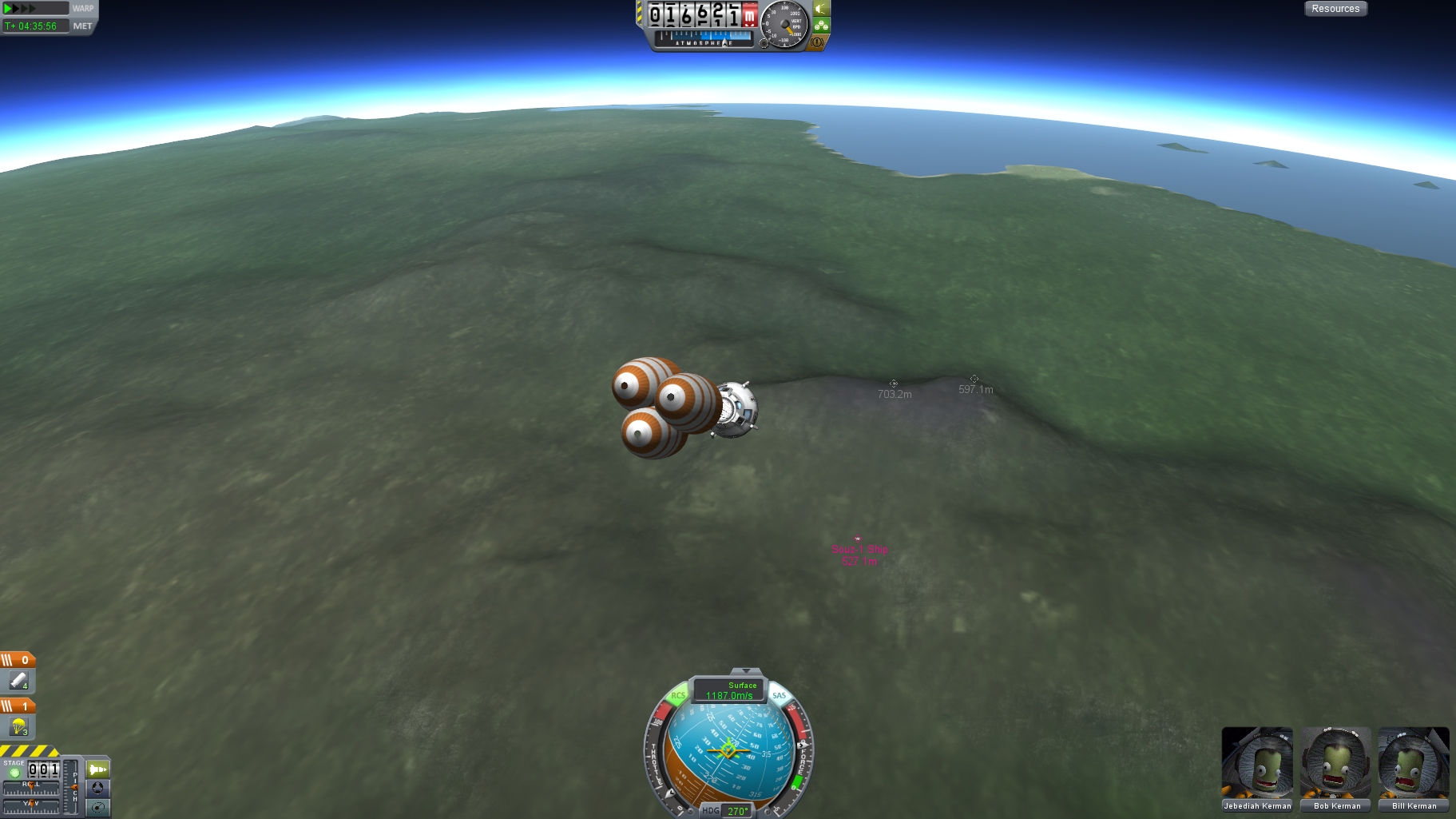
Инструментальный модуль так и летит рядом с кораблём, имеется опасность столкновения.

Но парашюты тормозят посадочный модуль, а обломки рассыпающегося корабля проносятся мимо, ничего не повредив.
Корабль приземляется прямо на камень; к счастью амортизация смягчает удар, и ущерб ограничивается синяками.


Что дальше? Постройка орбитальных станций? Полёт к Муне по так и не завершившейся программе? Или и то и другое? Посмотрим.
Продолжение следует.