Японцы исследователи обучили робота ремонтировать и улучшать самого себя

Когда роботы и другие робототехнические устройства станут самой обыденной и повседневной вещью, их возможности к самостоятельному ремонту и восстановлению будут одной из самых востребованных функций. Хочется надеяться, что в будущем эти роботы будут достаточно надежны и им не потребуется заниматься саморемонтом достаточно часто. Но в любом случае, им будет требоваться периодическое незначительное обслуживание, с которым они смогут справиться вполне самостоятельно.
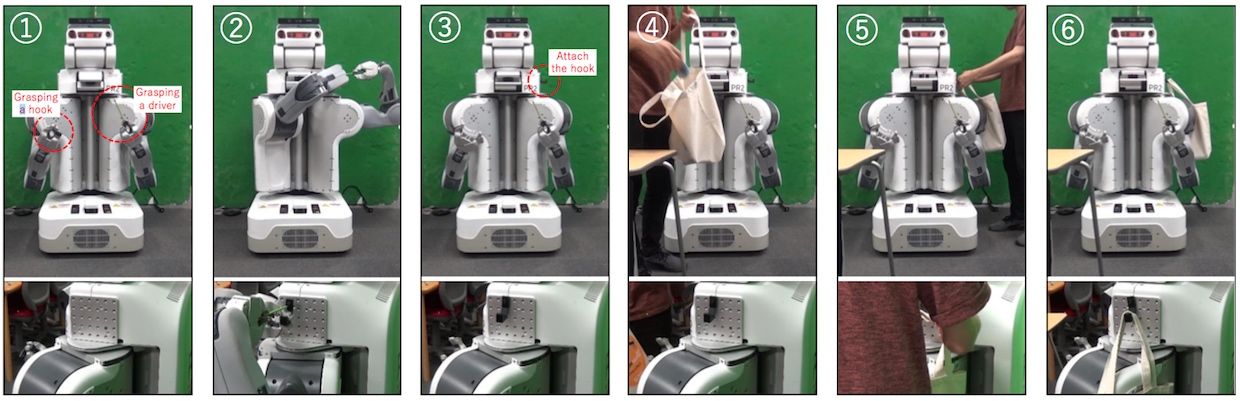
На выставке Humanoids 2019 в Торонто, Канада, исследователи из Токийского университета продемонстрировали робота PR2, обученного самостоятельно производить мелкие ремонтные работы своей конструкции. Более того, используя эти умения, робот смог расширить свои функциональные возможности, добавив себе дополнительные крюки и захваты, когда появилась необходимость в переноске большего количества вещей, чем могло уместиться на оригинальной конструкции.
Для снабжения робота PR2 в его память были загружены чертежи его конструкции, подготовленные в специальном формате в CAD-системе. Благодаря этому робот узнал, где именно находится каждый его винт и деталь. Однако, на нынешнем этапе робот еще не в состоянии определить уровень износа и состояние его узлов и деталей. Но он может узнать, насколько его текущее положение тела, манипуляторов и других элементов соответствуют цифровой модели. Это позволяет ему найти несоответствия, причиной которых может быть изношенная или вышедшая из строя деталь.
Более того, робот уже способен принять помощь от человека. Используя систему распознавания положения и движений, робот вполне может определить, на какую деталь указывает ему человек. Дальнейшее, как говорится, является делом техники, робот моментально определяет, какие винты ему надо открутить для того, чтобы добраться до требующей замены детали.
Однако, с самостоятельно заменой деталей у современных роботов возникает ряд трудностей, подвижность конечностей и манипуляторов просто не позволяет им добраться до всех уголков собственной конструкции. И для того, чтобы произвести ремонт чего-то, скрытого в таком «укромном месте», роботу потребуется найти другого робота, который окажет ему помощь с ремонтом.
Весьма непросто оказалось научить робота даже откручивать винты в его собственной конструкции. Если винт расположен в доступном месте, а его головка подходит под стандартную отвертку, то не возникает никаких проблем. Однако, большая часть винтов находятся в труднодоступных местах, и они имеют головки, к которым подходят только нестандартные ключи. Для работы с такими винтами робот должен уметь перехватывать ключ, делая это точно так же, как и человек, отворачивающий или заворачивающий винт буквально по миллиметру.
Но после того, как робот PR2 полностью освоил искусство отворачивании-заворачивания винтов, он смог заняться не только саморемонтом, но и модернизацией своей конструкции, делая ее более адаптированной для выполнения текущей конкретной задачи. Как уже упоминалось выше, робот смог сам установить себе дополнительные захваты и элементы крепления, благо его конструкция изначально предусматривала возможность установки дополнительных элементов. При этом, тип этих дополнительных элементов и место для их установки были определены роботом самостоятельно при помощи загруженных в него чертежей.