Pick n place head update
This is a quick follow up to the pick & place head article, in which I actually build the darn thing :-) As in, not just fit-test the parts together and take a picture, but actually pick and place some stuff with it. I’ve been busy/lazy, so not too much to show in terms of software yet (the video you see below is running a ‘dumb’ g-code placement script). The parts list has been updated will be updated in the next couple days, along with new CamBam/DXF files.
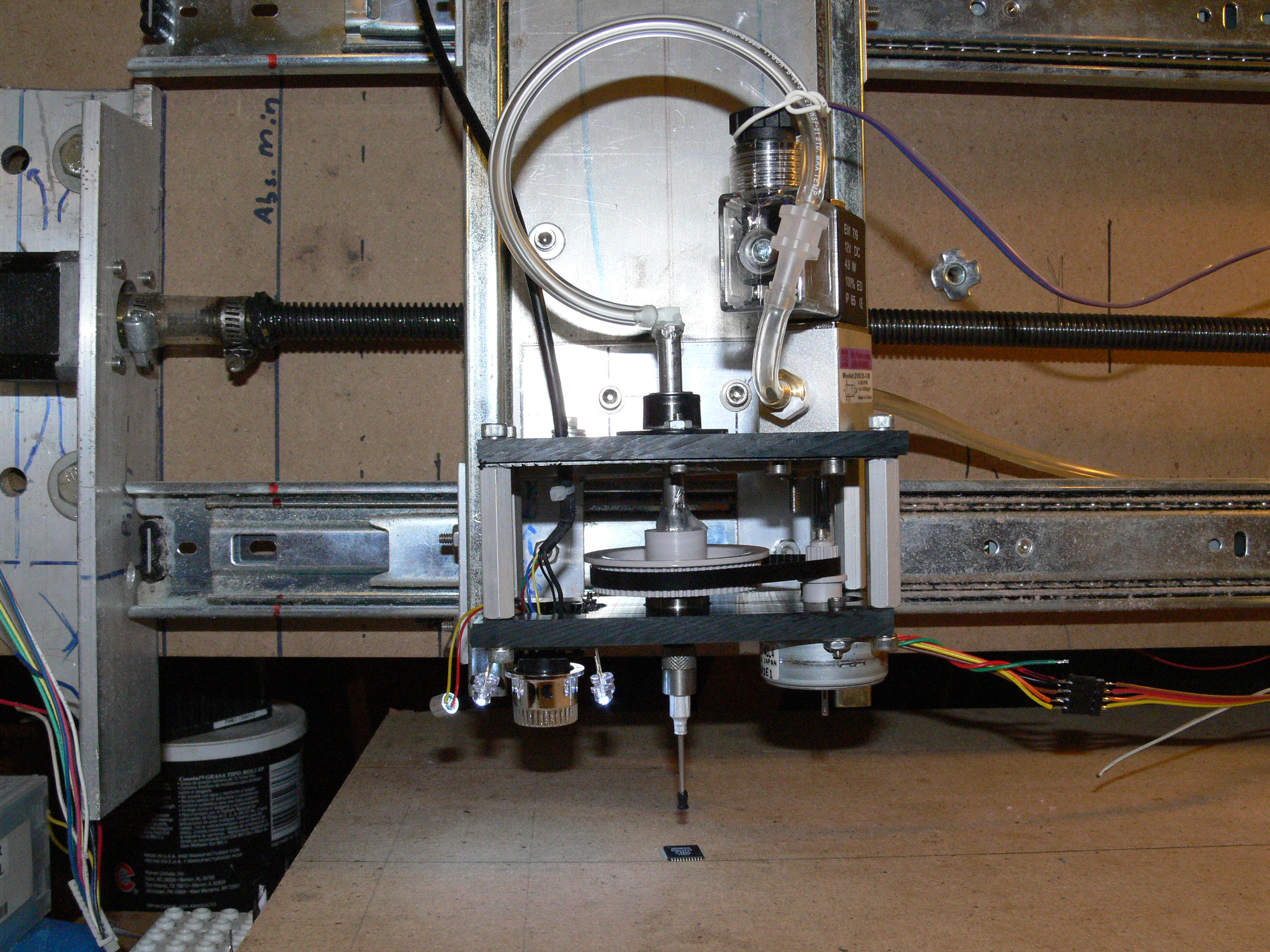
Live test of the head as currently designed. This is bolted to my ghetto homebrew CNC mill, which is kinda slow. On a more built-for-purpose (or less ghetto) machine, performance should be much better.
The webcam’s weird eyeball-shaped case has been removed, revealing a rectangular board with sanely-spaced mounting holes in its corners. Also, a proper solenoid valve has been bolted to the head and hooked up to a reversed aquarium pump for suction. The rubber nozzles are from a sacrificial el-cheapo SMD vacuum pen ($3USD ,eBay), which comes with three sizes that fit on a standard 16-gauge needle.
{kind=link}
Otherwise, it’s pretty much as described in the previous post.



A little bit of guts. This board holds a transistor to drive the 12VDC solenoid valve from a parallel port pin, Pololu microstepping motor driver (Allegro A4983) and 5V regulator. At the top you can make out a simple pressure sensor conditioning circuit that isn’t hooked up yet.
cexxy version