Как отправляли Curiosity на Марс.

Вот уже прошел новостной бум по поводу посадки марсохода на красную планету, мы уже подробнее вспомнили, что из себя представляет планета МАРС. А хорошо ли вы знаете, что из себя представляет сам марсоход "Любопытство" ( англ. Curiosity) ?
Давайте познакомимся с ним поближе.
26 ноября 2011 г. в 10:02 EST (15:02 UTC) со стартового комплекса SLC-41 Станции ВВС США «Мыс Канаверал» был выполнен пуск РН Atlas V №AV-028 с американской тяжелой межпланетной станцией Mars Science Laboratory (MSL). Целью экспедиции является исследование поверхности Марса с использованием марсохода Curiosity («Любопытство»).

Кликабельно 4000 рх
Проект MSL - это самая крупная американская миссия на Марс, являющаяся вершиной длительной и успешной программы исследования Красной планеты.
На пионерском этапе марсианской программы США провели съемку и зондирование планеты с трех пролетных (Mariner 4,6 и 7) и трех орбитальных (Mariner 9, Viking 1 и 2) аппаратов, а также исследование грунта Марса на наличие в нем признаков жизни в двух точках поверхности планеты (Viking 1 и 2, 1976 г.).
Современный этап начался запуском в сентябре 1992 г. большого орбитального аппарата Mars Observer с комплексом из шести научных приборов. К сожалению, КА был потерян в результате аварии двигательной установки в августе 1993 г. за несколько дней до выхода на орбиту спутника планеты.

Химическая камера , используется импульсный лазерный луч для испарения крошечной цели - минерального образца, полученные вспышки света могут быть проанализированы для выявления химических элементов. На фото главный исследователь Роджер Вине, Лос-Аламосской национальной лаборатории, (NASA / JPL-Caltech / LANL)
После этого было решено сделать ставку на малые КА, распределив между ними задачи погибшего «Обсервера» и дополняя их новыми исследованиями. Первым стал спутник Mars Global Surveyor, который был успешно выведен на рабочую орбиту в марте 1999 г. и продуктивно работал до ноября 2006 г., осуществляя обзорное и детальное фотографирование, высотную съемку с использованием лазерного альтиметра и картирование минерального состава поверхности Марса. Оставаясь вполне работоспособным через десять лет после старта, MGS был утрачен в результате ошибки при обновлении бортового программного обеспечения.

Этот тест для радиолокационной системы, которые будут использоваться в августе 2012 в момент спуска и посадки. Инженерный образец испытания радиолокационной системы на носу вертолета.
МИССИИ ПО ИССЛЕДОВАНИЮ МАРСАНаименованиеДата запускаОсновные результатыСтоимость, млн. $Mars Observer25.09.1992
Утрачен на подлете к Марсу980Mars Global Surveyor (MGS)07.11.1996
Аэродинамическое торможение для перехода на рабочую орбиту. Съемка и зондирование поверхности и атмосферы Марса с орбиты в течение 9 лет (1997-2006). Составил трехмерную карту рельефа планеты, обнаружил залежи гидратированных минералов и овраги, промытые водой219Mars Pathfinder (MPF)04.12.1996
Мягкая посадка на Марс. Съемка и исследование грунта с использованием аппаратуры посадочного аппарата и малого марсохода Sojourner266Mars Climate Orbiter (MCО)11.12.1998
Сгорел в атмосфере Марса из-за навигационной ошибки328Mars Polar Lander (MPL)03.01.1999
Утрачены при аварийной посадке на Марс в районе 76°ю.ш., 165°в.д.Deep Space 13Mars Odyssey07.04.2001
Съемка и зондирование поверхности и атмосферы Марса с орбиты до настоящего времени.' Открыл обширные зоны наличия подповерхностного льда297Mars Exploration Rover-A (Spirit)10.06.2003
Марсоходы среднего класса. Съемка и исследование фунта Марса по маршруту движения. Spirit работал с января 2004 до марта 2010 г. Opportunity работает830Mars Exploration Rover-B (Opportunity)08.07.2003
до настоящего времени к 1 декабря 2011 г. прошел 34 км. Обнаружены минералы, образовавшиеся в водной среде, изучены слоистые отложенияMars Reconnaissance Orbiter (MRO)12.08.2005
Высокодетальная съемка поверхности Марса с орбиты, изучение следов воды на его поверхности и выполнение атмосферной программы КА МСО540Phoenix04.08.2007
Аналитическое исследование фунта в северной полярной зоне Марса в районе 68.22°с.ш. и 125.75°з.д. Обнаружил лед под слоем грунта на глубине около 5 см386Mars Science Laboratory26.11.2011
Исследовательский марсоход тяжелого класса - мобильная долговременная автоматическая научная лаборатория2476MAVEN31.10.2013
Детальное исследование эволюции атмосферы Марса, истории ее климата и возможной обитаемости655

Кратер Gale (кратер Гейла) будущее место посадки марсохода Curiosity. В августе 2012 года ровер сядет в северной части кратера. Кратер достигает 154 км в диаметре, в его центре гора в высоту 5 км. Место посадки очерчено элипсом (20х25 км). Поверхность кратера в районе посадки указывает на воздейстаие воды.(NASA / JPL-Caltech / ASU)

Кожух посадочного модуля (NASA / Jim Гроссман)


Тепловизор крепится на руке марсохода НАСА в Лаборатории реактивного движения в Пасадене, Калифорния, 4 апреля 2011 года. (AP Photo / Damian Dovarganes)



К началу 2002 г. было решено, что целесообразно делать долгоживущую мобильную лабораторию с питанием от радиоизотопного генератора, а это потребовало отсрочить запуск до сентября 2009 г. Одновременно сменилось имя проекта: сокращение осталось прежним - MSL, а вот расшифровка стала иной - Mars Science Laboratory, то есть марсианская научная лаборатория. Именно ей предстояло открывать новый цикл изучения Марса в 2009-2020 гг., программу которого готовила так называемая «группа синтеза» из ученых NASA и университетов США с учетом рекомендаций Национального исследовательского совета Национальной академии наук США.

В феврале 2003 г. «группа синтеза» сформулировала четыре возможные стратегии научных поисков на Марсе, каждой из которых соответствовали цели MSL и районы ее работы: поиск следов прошлой жизни, изучение районов гидротермальных проявлений, поиск сегодняшней жизни и изучение эволюции планеты. Для оценки научных задач первой экспедиции в каждом из вариантов была сформирована «группа научной интеграции» во главе с Дэниелом МакКлизом (Daniel J. McClease) из JPL и Джеком Фармером (Jack D. Farmer) из Университета штата Аризона.

В августе 2005 г. начался этап реализации проекта, то есть детального проектирования, изготовления и испытаний КА. Основные компоненты посадочного аппарата разрабатывались Лабораторией реактивного движения JPL, а создание системы, обеспечивающей его вход в атмосферу Марса и безопасное торможение в ней, в марте 2006 г. было поручено компании Lockheed Martin Space System. Общая стоимость MSL была оценена тогда в 1327 млн $.

Сейчас общая стоимость проекта оценивается в 2476 млн $ - почти вдвое больше, чем пять лет назад. Около 1.8 млрд из общей суммы приходится на разработку КА и научной аппаратуры, остальное - на запуск и управление. Очередная, казалось бы, миссия к Марсу, обошлась почти во столько же, что и все девять пусков между 1992 и 2011 г., и достигла уровня уникальных проектов флагманского класса. И, увы, нельзя не сравнить ее стоимость с расходами на отечественный проект аналогичного уровня сложности «Фобос-Грунт», официально исчисленными в 5 млрд руб - в пятнадцать раз меньше, чем у американцев!

MSL и в самом деле превосходит всех своих предшественников, и не только по сложности, но и просто по отправляемой к Марсу массе. Если Mars Observer «потянул» на 2487 кг, а масса MRO составила 2180 кг, то стартовая масса нового марсианского аппарата равна 3839 кг. Комплекс MSL делится натри основные части:
- перелетная ступень, обеспечивающая полет по траектории от Земли к Марсу, включая коррекции этой траектории, общей массой 539 кг;
- система обеспечения входа в атмосферу, торможения и посадки массой 2401 кг;
- ровер массой 899 кг.

Максимальный диаметр КА (диаметр лобового экрана для торможения в атмосфере Марса) составляет 4.50 м, длина изделия - 2.95 м.
Перелетная ступень выполнена в виде цилиндрического «бублика» диаметром 4.50 м и высотой около 0.90 м с фиксированной солнечной батареей на нижней его части и десятью радиаторами жидкостной системы терморегулирования по периметру. В течение всего полета до Марса она управляется бортовым компьютером ровера, будучи соединена с ним через интерфейсный блок на хвостовом экране десантной части и системы посадочной ступени. Питание ступени осуществляется от шести панелей СБ общей площадью 12.8 м2, выдающих 1080 Вт у Марса при наихудшей возможной ориентации, а при необходимости - и от радиоизотопного генератора марсохода. Ступень оснащена звездным датчиком и двумя блоками солнечных датчиков для определения текущей ориентации. На ней имеется два блока по четыре гидразиновых ЖРД MR-111C тягой по 1.1 кгс, обеспечивающих закрутку КА и коррекции траектории перелета. Топливо хранится в двух титановых сферических баках диаметром по 48 см. На перелетной ступени установлена антенна среднего усиления MGA, с помощью которой большую часть полета осуществляется связь с Землей.
Десантный комплекс можно разделить на лобовой экран, хвостовой обтекатель, находящуюся внутри них посадочную ступень и собственно полезный груз - ровер. Все его системы также управляются компьютером марсохода.
Лобовой экран в виде тупого конуса - наибольший из всех подобных изделий для межпланетных аппаратов. Lockheed Martin делала его с учетом опыта по экрану спускаемого аппарата пилотируемого корабля Orion. Композитная конструкция воспринимает механические нагрузки, достигающие 50 тонн, а теплозащиту обеспечивает фенольно-углеродное абляционное покрытие PICA, разработанное Центром Эймса и впервые использованное на возвращаемой капсуле КА Stardust.

На фото Передний лобовой экран и хвостовой обтекатель, именно они будут защищать марсоход при спуске в атмосфере МарсаЫ. Космический центр им. Кеннеди, Флорида.

Биконический хвостовой обтекатель покрыт пробочно-силиконовой теплозащитой типа SLA-561V. На нем смонтированы восемь двигателей управления спуском MR-107U тягой по 30.8 кгс, сбрасываемые балансировочные грузы, парашютная система и три антенны - для связи с Землей в Х-диапазоне и со спутниками Марса на УКВ.
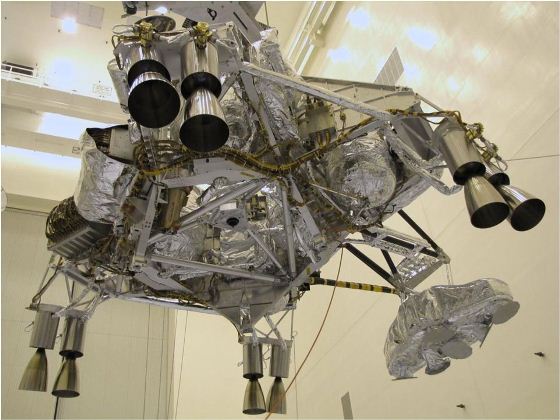
Посадочная ступень MSL, в отличие от всех своих предшественников, несет полезный груз не на себе, а под собой: марсоход крепится к ней пироболтами. Ступень оснащена восемью посадочными двигателями MLE (Mars Landing Engine) - по два на четырех углах платформы. Эти ЖРД регулируемой тяги (до 336 кгс) типа MR-80B работают на гидразине, запас которого - 387 кг - хранится в трех сферических баках. Посадочный радиолокатор с шестью дисковидными антеннами измеряет ориентацию, горизонтальную и вертикальную скорость. Посадочная ступень оснащена приемопередатчиком, усилителем и антеннами X- и УКВ-диапазона.
Ровер Curiosity («Любопытство») получил свое имя в мае 2009 г. по результатам всеамериканского конкурса, который выиграла 12-летняя Клара Ма из городка Ленекса в штате Канзас. Его часто сравнивают с небольшим автомобилем. Действительно, длина ровера без учета манипулятора достигает 3.00 м, ширина - 2.77 м, а высота с мачтой с телекамерами - 2.13 м. Система движения построена сходно с марсоходами MER и имеет в своем составе шесть ведущих колес диаметром 0.51 м с грунтозацепами, причем четыре из них - ориентируемые. Максимальная скорость Curiosity - 4 см/с.

Манипулятор с пятью степенями свободы несет турель массой 33 кг с двумя научными приборами и тремя инструментами для копки грунта, фрезерования камней и дробления образцов.
Ровер питается от расположенного в хвостовой части радиоизотопного генератора типа MMRTG (диаметр 64 см, длина 66 см, масса 45 кг), имеющего в своем составе 4.8 кг радиоактивного изотопа плутония-238. Выделяемое при его распаде тепло преобразуется в электрическую энергию - 110 Вт, или около 2700 Вт-ч за сутки. Минимальный ресурс генератора - 14 лет. Два литий-ионных аккумулятора емкостью по 42 А-ч позволяют накапливать энергию и отдавать ее в те периоды, когда энергопотребление ровера выше средней мощности MMRTG.

Манипулятор с пятью степенями свободы несет турель массой 33 кг с двумя научными приборами и тремя инструментами для копки грунта, фрезерования камней и дробления образцов.
Ровер питается от расположенного в хвостовой части радиоизотопного генератора типа MMRTG (диаметр 64 см, длина 66 см, масса 45 кг), имеющего в своем составе 4.8 кг радиоактивного изотопа плутония-238. Выделяемое при его распаде тепло преобразуется в электрическую энергию - 110 Вт, или около 2700 Вт-ч за сутки. Минимальный ресурс генератора - 14 лет. Два литий-ионных аккумулятора емкостью по 42 А-ч позволяют накапливать энергию и отдавать ее в те периоды, когда энергопотребление ровера выше средней мощности MMRTG.

Два дублированных бортовых компьютера Curiosity построены на процессоре RAD 750 с тактовой частотой 200 МГц, имеют постоянное запоминающее устройство емкостью 256 кбайт, оперативную память 256 Мбайт и 2 Гбайт флэш-памяти. Для планирования движения и обнаружения опасностей ровер оснащен в общей сложности 12 техническими камерами, в том числе двумя парами навигационных камер NavCam с полем зрения 45° и «картинкой» размером 1024x1024 элемента, а также четырьмя стереопарами контрольных камер HazCam с объективом типа «рыбий глаз» и полем зрения 124°. Эти камеры поровну распределены между двумя компьютерами.
Радиообмен с Землей идет непосредственно через 15-ваттный передатчик и две антенны Х-диапазона (в том числе остронаправленную диаметром 0.3 м) либо через орбитальные ретрансляторы по «местной» УКВ-линии. В первом случае пропускная способность не превышает нескольких килобит в секунду, во втором достигает 0.25 Мбит/с через Mars Odyssey и 2 Мбит/с через MRO. Всего за сутки MSL сможет передавать примерно по 250 Мбит данных.
На верхней панели корпуса ровера закреплены два памятных чипа: один с 1.24 млн имен, присланных в JPL по электронной почте в рамках кампании «Отправь свое имя к Марсу», и второй - с 20000 отсканированными именами людей, увидевших его в JPL и Космическом центре имени Кеннеди.

Основная цель проекта сформулирована так: исследование и описание конкретного района Марса и проверка наличия там в прошлом или настоящем природных условий, благоприятных для существования жизни (вода, энергия, химические ингридиенты). Можно сказать и так: к старому лозунгу марсианских исследований «ищи воду» MSL добавляет новый - «ищи углерод». Биологический потенциал зоны посадки предстоит определить исходя из наличия и количества органических соединений и тех химических элементов, которые являются основой жизни (С, Н, N, О, Р и S), а также путем поиска ее внешних проявлений. Параллельными задачами является описание геологии и геохимии района посадки на всех возможных пространственных масштабах, изучение планетарных процессов, которые могли иметь отношение к жизни в прошлом, а также исследование радиационной обстановки.

Не входят в программу работ поиски самой жизни - ни в виде микроорганизмов, ни путем регистрации биохимических процессов, как пытались сделать в 1976 г. на «Викингах». Однако если MSL докажет потенциальную пригодность исследуемого района для жизни, в дальнейшем могут быть предприняты экспедиции для биологических исследований на месте или для доставки образцов грунта на Землю.
Для решения поставленных задач марсоход Curiosity оснащен комплексом из 10 научных приборов суммарной массой 75 кг, которые подразделяются на обзорные инструменты (размещенные на мачте на высоте около 2 м над грунтом планеты), контактные (выносимые к объекту исследования с помощью манипулятора) и аналитические (для анализа образцов грунта и атмосферы Марса). В эту классификацию не входят десантная камера, работающая на этапе спуска, и приборы радиационного контроля и метеонаблюдений. Кроме того, на лобовом экране спускаемого аппарата установлены датчики для регистрации условий гиперзвукового входа и полета в атмосфере.

Отметим, что ныне работающий на Марсе ровер Opportunity имеет комплект научной аппаратуры общей массой всего 5 кг и масса одного лишь анализатора SAM на борту Curiosity составляет 40 кг.

Камера MastCam в первоначальном варианте проекта была задумана как цифровая стереокамера с двумя объективами, оси которых находятся на высоте 1.97 м над грунтом и разнесены на 24.5 см по горизонтали. Каждый из них должен был иметь переменное фокусное расстояние в пределах от 6.5 до 100 мм, что позволяло вести стереосъемку при любом уровне «зума». Однако в сентябре 2007 г. NASA распорядилось изменить проект в пользу двух камер с фиксированным фокусным расстоянием -100 мм на правом «глазу» и 34 мм на левом. В начале 2010 г., когда они были уже изготовлены, агентство согласилось оплатить компании MSSS первоначальные камеры с зумом с тем условием, что они будут поставлены на борт в случае своевременного изготовления и соответствия заявленным характеристикам. Однако в итоге Curiosity так и остался «разноглазым».
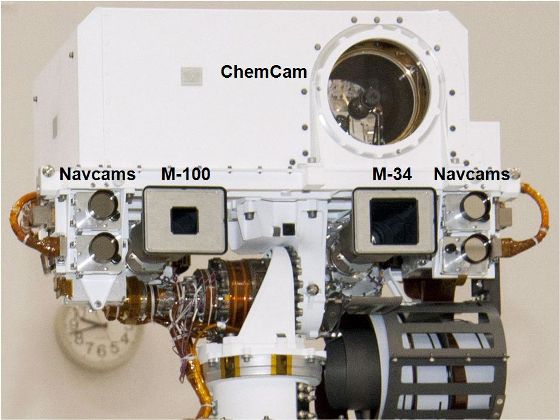
Итак, левая обзорная камера М-34 с фокусным расстоянием 34 мм и светосилой 1:8 имеет поле зрения 15° по вертикали и 18° по горизонтали. Правая камера М-100 с фокусным расстоянием 100 мм и светосилой 1:10 имеет поле зрения 5x6°. Ее разрешение составляет около 7.5 см на дальности 1 км и 0.15 мм на расстоянии 2 м, что позволит использовать М-100 для поиска интересных объектов для исследования. Обе камеры могут фокусироваться на объектах на расстоянии от 1.8 м до бесконечности.
В конструкции обеих камер применен встроенный байеровский фильтр, позволяющий одновременно фиксировать красный, зеленый и синий компонент изображения на приемной матрице фирмы Kodak размером 1600x1200 элементов. Этот режим применяется совместно с широкополосным сменным фильтром; помимо него имеется еще семь фильтров, из которых три (440,525 и 1035 нм) общие для обеих камер, а четыре индивидуальны для каждой из них.

Российская аппаратура, установленная на американском марсоходе Curiosity, работает в штатном режиме, сообщил научный сотрудник Института космических исследований РАН (ИКИ) Максим Литвак, находясь в Лаборатории реактивного движения НАСА в Калифорнии. Его слова передает РИА «Новости».
Работоспособность нейтронного детектора (ДАН - детектор альбедных нейтронов), разработанного в ИКИ, уже проверили. Первое включение было короткое, потом он также будет включаться и выключаться в соответствии с графиком работы. Российский прибор стал одним из двух «иностранцев» из десяти научных инструментов, установленных на Curiosity. Испанцы для него разработали метеостанцию REMS.
ДАН способен определить на планете содержание водорода, а значит и воды, а также гидратированных минералов. Зоны с большой концентрацией этих веществ наиболее интересны ученым.
Принцип работы нейтронного детектора заключается в том, что он облучает поверхность планеты нейтронами высоких энергий, затем по свойству потока вторичных нейтронов и определяет содержание тех или иных веществ. Он сможет «почувствовать» присутствие воды в грунте, даже если ее содержание там будет минимальным. Примечательно, что специалисты НАСА выбрали для посадки марсохода район, где так мало льда. Это сделано для того, чтобы не заразить Марс земными микроорганизмами.
Такая технология уже была опробована ранее на двух приборах, разработанных в ИКИ. Устройство ХЕНД уже более 10 лет работает на марсианской орбите, на борту зонда «Марс-Одиссей». С помощью него ученые установили, что в высоких широтах планеты присутствует толстый слой льда. А детектор ЛЕНД на борту зонда LRO нашел лед в кратерах у лунных полюсов.

Импульсный нейтронный генератор ДАН-ИНГ, изготовленный во ВНИИ автоматики имени Н.Л.Духова на базе промышленного импульсного генератора, способен выдать примерно 107 импульсов с частотой до 10 раз в секунду по 10 млн частиц в импульсе. Регистрирующий блок ДАН-ДЭ создан в лаборатории космической гамма-спектроскопим И. Г. Митрофанова в ИКИ. В разработке и создании комплекса аппаратуры участвовали также Институт машиноведения имени А.А. Благонравова РАН и Объединенный институт ядерных исследований (Дубна).
ДАН будет проводить измерения вдоль трассы движения марсохода во время длительных стоянок и остановок, чтобы оперативно оценивать содержание воды и гидратированных соединений в грунте. При обнаружении участков с повышенным содержанием воды будут проводиться детальные исследования грунта другими приборами.

М-34 может снять цветную круговую панораму до высоты 60° из 150 кадров примерно за 25 минут. Предусмотрен также режим видеосъемки с шириной кадра 720 пикселов и скоростью 4-7 кадров в секунду, в зависимости от экспозиции. Каждая камера имеет флэш-память объемом 8 Гбайт и собственный блок обработки и сжатия изображений, функционирующий независимо от основного компьютера марсохода. Блоки электроники MastCam и еще двух камер MARDI и MAHLI, также разработанных MSSS, аналогичны.
Новым и очень интересным инструментом MSL является анализатор элементного состава пород ChemCam, расположенный на мачте рядом с камерами. Основная задача ChemCam - выбор среди окружающих ровер пород наиболее интересных для химического анализа. Прибор имеет в своем составе инфракрасный лазер, способный сконцентрировать на определенной точке образца достаточную мощность для испарения его верхнего слоя, и спектрометр для регистрации спектра образовавшейся плазмы. Лазерный импульс продолжительностью 5 нс и мощностью более 1 МВт излучается через телескопическую систему с апертурой 110 мм, которая также служит для приема ответного сигнала и для контрольной съемки образца на матрицу размером 1024x1024.
Излучение испаренного вещества по шестиметровому оптоволоконному кабелю передается на три спектрометра, размещенные в корпусе марсохода, где разлагается на 6144 спектральных канала в диапазоне от 240 до 850 нм. Спектры позволяют определить элементный состав образца, и в первую очередь количество натрия, магния, алюминия, кремния, кальция, калия, титана, марганца, железа, водорода, кислорода, бериллия, лития, стронция, серы, азота и фосфора. Многократная «стрельба» по одной и той же точке улучшает надежность их определения, а также позволяет удалить слой пыли или ржавчины и вести измерения по нижележащему веществу. ChemCam способен оперативно определять содержание в образце кислорода и водорода и однозначно выявлять воду.
Партнером Лос-Аламосской лаборатории в создании ChemCam является французский Институт исследований в области астрофизики и планетологии в Тулузе, поставивший лазер и телескоп. В Лос-Аламосе были изготовлены спектрометры и

Тестирование парашюта.
Спектрометр имеет радиоактивный источник с 0.7 г альфа- и гамма-активного изотопа кюрия 244Си в составе измерительной головки и блок регистрации «ответного» рентгеновского излучения в корпусе ровера. Этот изотоп имеет период полураспада 18.1 года, а это значит, что быстродействие и чувствительность прибора будут практически неизменными в течение всего срока работы ровера. Детектор APXS размещается на высоте всего 20 мм над объектом, благодаря чему время измерений сокращается втрое.
Прибор определяет содержание элементов в диапазоне от натрия до стронция, включая такие породообразующие компоненты, как натрий, магний, алюминий, кремний, кальций, железо и сера. Высокая чувствительность к сере, хлору и брому позволит ему уверенно определять залежи солей. В режиме «быстрого просмотра», за 10 минут, он может определить элементы с концентрацией до 0.5%, а за трехчасовой сеанс измерений - малые составляющие в количестве до 0.01%. Твердотельный электрический холодильник позволяет использовать детектор не только ночью, как на марсоходах 2003 года, но и днем.
Микроскопическая камера МАНИ предназначена для получения детальных изображений исследуемых образцов и участков грунта. От своего предшественника на роверах MER она отличается цветным «зрением», подсветкой и наличием автофокуса. Разрешение МАНИ при съемке с предельно малого расстояния 21 мм составляет 14 мкм в поле зрения 22x17 мм. Камера оснащена двумя белыми светодиодами для съемки ночью и в тени и двумя светодиодами, излучающими в ультрафиолете (365 нм), для флуоресцирующих материалов. Изображение принимается на матрицу 1600x1200 пикселов.
Рентгеновский диффракционный анализатор CheMin позволяет изучать структуру и состав кристаллических образцов. Масса прибора - 10 кг, объем - примерно 25x25x25 см. Он смонтирован в корпусе ровера и имеет на верхней поверхности воронку со сдвигаемой крышкой для загрузки образцов. Это может быть либо песок, либо порода, предварительно измельченная и просеянная через сито с ячейкой 0.15 мм. Приемное устройство разделено на 32 сектора, в пяти из которых заложены на Земле контрольные образцы, а остальные 27 могут быть использованы, причем многократно, для анализа марсианских пород. На одно измерение требуется примерно 10 часов облучения образца кобальтовым источником. CheMin определяет элементы с атомным номером от 11 (натрий) и выше и минералы, составляющие по крайней мере 3% изучаемого образца. Он также способен определить некристаллические ингредиенты, такие как вулканическое стекло.
Аппаратура SAM, самая сложная и тяжелая на борту MSL, предназначена для поиска органических соединений в количестве до одной части на миллиард и для измерения соотношений изотопов отдельных элементов (в частности, 12С/13С и 18O/16O). Исследоваться будут как составляющие атмосферы, так и газы, выделяющиеся из образцов грунта под действием химических агентов и нагрева. Измельченный грунт поступает в прибор через две приемные воронки. Система подачи образцов манипулирует 74 кюветами объемом по 0.78 см3, из которых шесть содержат контрольные образцы, девять предназначены для химической обработки, а 59 -из кварцевого стекла - для возгонки. Две «печки» способны нагревать образцы до 1000°С, потребляя при этом всего 40 Вт. Микроклапаны (в количестве 52) обеспечивают перемещение газовых порций, а два вакуумных насоса создают рабочие условия для измерительных устройств.

В составе SAM имеется три аналитических прибора, размещенных в корпусе марсохода. Масс-спектрометр определяет ионизированные газы по молекулярному весу и заряду. Он рассчитан на регистрацию важнейших составляющих живой материи - азота, фосфора, серы, кислорода, водорода и углерода. Лазерный спектрометр использует явление абсорбции света на конкретных длинах волн для определения концентраций метана, углекислого газа и водяного пара и выявления их изотопных вариантов. (Соотношения между изотопами расскажут историю потери Марсом своей атмосферы и климата на планете.) Наконец, газовый хроматограф, созданный французскими специалистами, разделяет газовую смесь и выявляет органические соединения с помощью капиллярной колонки, а затем направляет фракции в масс-спектрометр для более точного определения.
Десантная камера MARDI предназначена для цветной видеосъемки на этапе спуска и приземления с целью привязки района посадки, получения контекстной геологической информации и планирования начального этапа движения ровера. Во время работы на поверхности с ее помощью можно будет снимать грунт непосредственно под днищем марсохода с разрешением до 1.5 мм. MARDI снимает в поле зрения 70x55° на матрицу 1600x1200 пикселов при частоте кадров до 4 в секунду.

Радиационный комплекс RAD представляет собой телескоп с детекторами заряженных частиц, нейтронов и гамма-лучей, приходящих как из атмосферы, так и со стороны поверхности планеты. Измерения уровней солнечного и галактического излучения - по 15 минут в течение каждого часа - позволят сделать выводы о пригодности района работы Curiosity для жизни в настоящее время и в прошлом и, что еще более важно, получить количественные оценки радиационных доз по трассе перелета и на поверхности Марса и необходимого уровня защиты для проектов пилотируемых экспедиционных комплексов. Создание RAD было профинансировано Директоратом исследовательских систем NASA и Германским аэрокосмическим центром.
Испанский метеорологический комплекс REMS включает датчики скорости и направления ветра, атмосферного давления, температуры и влажности, а также инфракрасный датчик температуры грунта и прибор для измерения ультрафиолетового излучения Солнца в шести спектральных полосах. Данные REMS предполагается снимать ежечасно в течение пяти минут.
Научным руководителем всего проекта MSL является Джон Гротцингер (John Grotzinger) из Калифорнийского технологического института.
















Кликабельно 6000 рх
Curiosity уже получил 360-градусную панораму Марса. Конечно, панорама не целостная, а состоит из 130 изображений разрешением 144 на 144 пикселя