К ноге робота подключили «мышцы»: теперь она прыгает выше и реагирует быстрее

Инженеры разработали мускульный привод, который имитирует принцип работы человеческих мышц.
Инженеры из Швейцарской высшей технической школы Цюриха (ETH Zurich) и Института интеллектуальных систем Макса Планка создали мускульный привод для роботизированных конечностей. В отличие от традиционных роботов, которые используют электродвигатели, систему приводит в движение электрогидравлические «мышцы». Система имитирует принципы работы человеческих мышц и сухожилий.
Приводы HASEL состоят из заполненных маслом пластиковых пакетов, покрытых с обеих сторон электропроводящими электродами. Когда на электроды подается напряжение, они притягиваются, сжимая пакет и создавая движение, аналогичное сокращению мышцы.
Пары таких приводов, прикрепленные к скелету, повторяют естественные движения разгибания и сгибания когда одна мышца укорачивается, ее напарница удлиняется. Исследователи используют компьютерный код, который взаимодействует с усилителями высокого напряжения, чтобы контролировать, какие приводы сокращаются, а какие растягиваются.
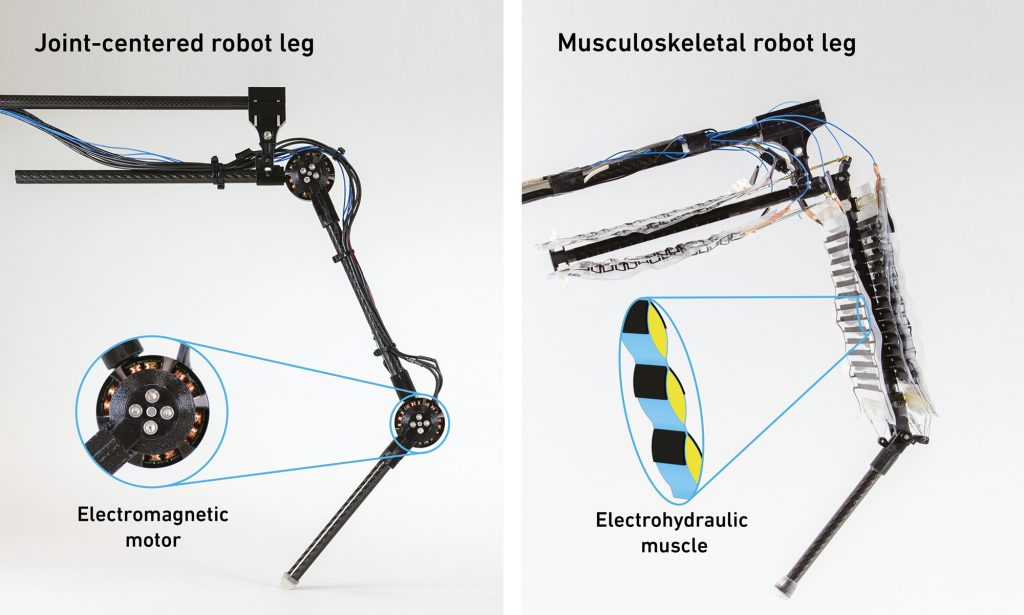
Традиционная система с электродвигателями (слева) и электрогидравлический мускульный привод (справа). Изображение: Thomas Buchner / ETH Zurich und Toshihiko Fukushima / MPI-IS
Такая конструкция имеет ряд преимуществ, отмечают разработчики. Во-первых, по сравнению с электродвигателями у нее выше энергоэффективность: благодаря электростатическому принципу работы «мышцы» выделяют намного меньше тепла. Во-вторых, роботизированная нога с мускульным приводом прыгает выше и быстрее, а также лучше реагирует на изменения рельефа.
В отличие от электродвигателей, которые полагаются на датчики для определения положения ноги, искусственная мышца адаптируется к соответствующему положению посредством взаимодействия с окружающей средой. Эта адаптация контролируется всего двумя входными сигналами: одним для сгибания и одним для разгибания сустава.
Хоть на данном этапе роботизированная нога пока ограничена в возможности свободного перемещения, исследователи видят большой потенциал этой технологии. В перспективе такие «мускулистые» конечности могут применяться в спасательной робототехнике, помогая роботам эффективно передвигаться по пересеченной местности.