В MIT разработали материал для роботов, который «чувствует» свои движения
Инженеры печатают на 3D-принтере материалы со встроенными «жидкостными датчиками». Они могут определять растяжение, сжатие и движения.
Исследователи из Массачусетского технологического института разработали метод печати на 3D-принтере материалов с настраиваемыми свойствами, которые определяют, как они движутся и взаимодействуют с внешней средой. Готовые компоненты печатаются за один проход, а «чувствительность» достигается за счет «жидкостных датчиков» - заполненных воздухом каналов.
В своей работе, опубликованной в Science Advances, инженеры напечатали «архитектурные материалы» - решетки, механические свойства которых зависят исключительно от архитектуры. Например, изменение размера или формы ячеек в решетке делает материал более или менее гибким.
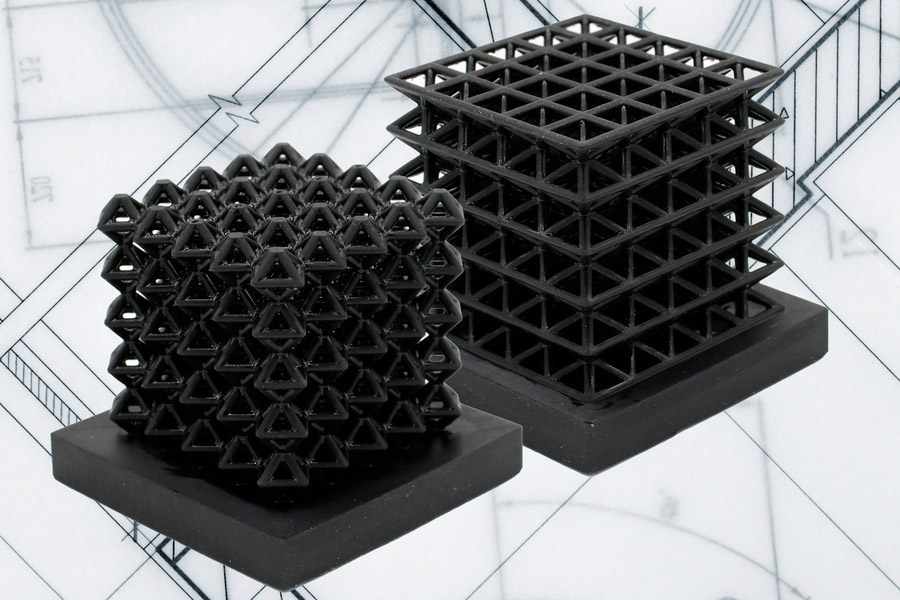
Кристаллические решетчатые структуры с заполненными воздухом каналами. Выемки в середине решеток - это отверстия датчиков. Изображение: MIT News
Исследователи включают воздушные каналы в структуру, используя 3D-печать с цифровой обработкой света. В этом методе структура вытягивается из лужи смолы и затвердевает в нужной форме под действием света. Изображение проецируется на жидкий материал, и участки, на которые падает свет, затвердевают.
Сложность в создании полых каналов состоит в том, что смола застревает внутри сенсорных каналов. Чтобы решить эту проблему, ученые использовали комбинацию сжатого воздуха, вакуума и сложной очистки для удаления излишков смолы.
При перемещении или сдавливании готовой конструкции сенсорные каналы деформируются, а объем воздуха внутри изменяется. Исследователи измеряют перепады давления и определяют, как деформируется материал.

Мягкий роботизированный палец, сделанный из двух цилиндров, состоящих из ауксетиков HSA. Изображение: MIT News
Чтобы показать возможности применения технологии, ученые напечатали на 3D-принтере мягкого робота из ауксетика HSA. Это материал с отрицательным значением коэффициента Пуассона, который применяется в робототехнике. При растяжении такие материалы становятся толще, а не тоньше в направлении перпендикулярном приложенной силе.
Созданный робот мог выполнять несколько движений, включая сгибание, скручивание и удлинение. Робот выполнял различные движения в течение более 18 часов, а исследователи использовали данные «жидкостных датчиков» для обучения нейронной сети, которая точно предсказала движения робота.
Мы можем взять любой материал, который можно распечатать на 3D-принтере, и проложить каналы по нему, чтобы получить чувствительную структуру. А если использовать действительно сложные материалы, можно получить движение, восприятие и структуру одновременно.
Лилиан Чин, соавтор исследования из Массачусетского технологического института