Обновление ПО марсохода Curiosity добавит ему самостоятельности и сноровки
Специалистов Национального аэрокосмического агентства США (NASA) трудно упрекнуть в стремлении упростить себе работу, даже когда речь идет о выполнении сложнейших проектов за пределами Земли. Но, как показывает практика, выбор более сложных путей решения задачи приносит свои плоды. Взять хотя бы разработанную и опробованную многоступенчатую схему посадки марсохода Curiosity, в которой нашлось место и парашютам со спускаемой капсулой, и реактивным двигателям с «воздушным краном». Применение такого подхода позволило без малейшей угрозы научному оборудованию и работоспособности ровера в целом, осуществить мягкую посадку на марсианскую поверхность. 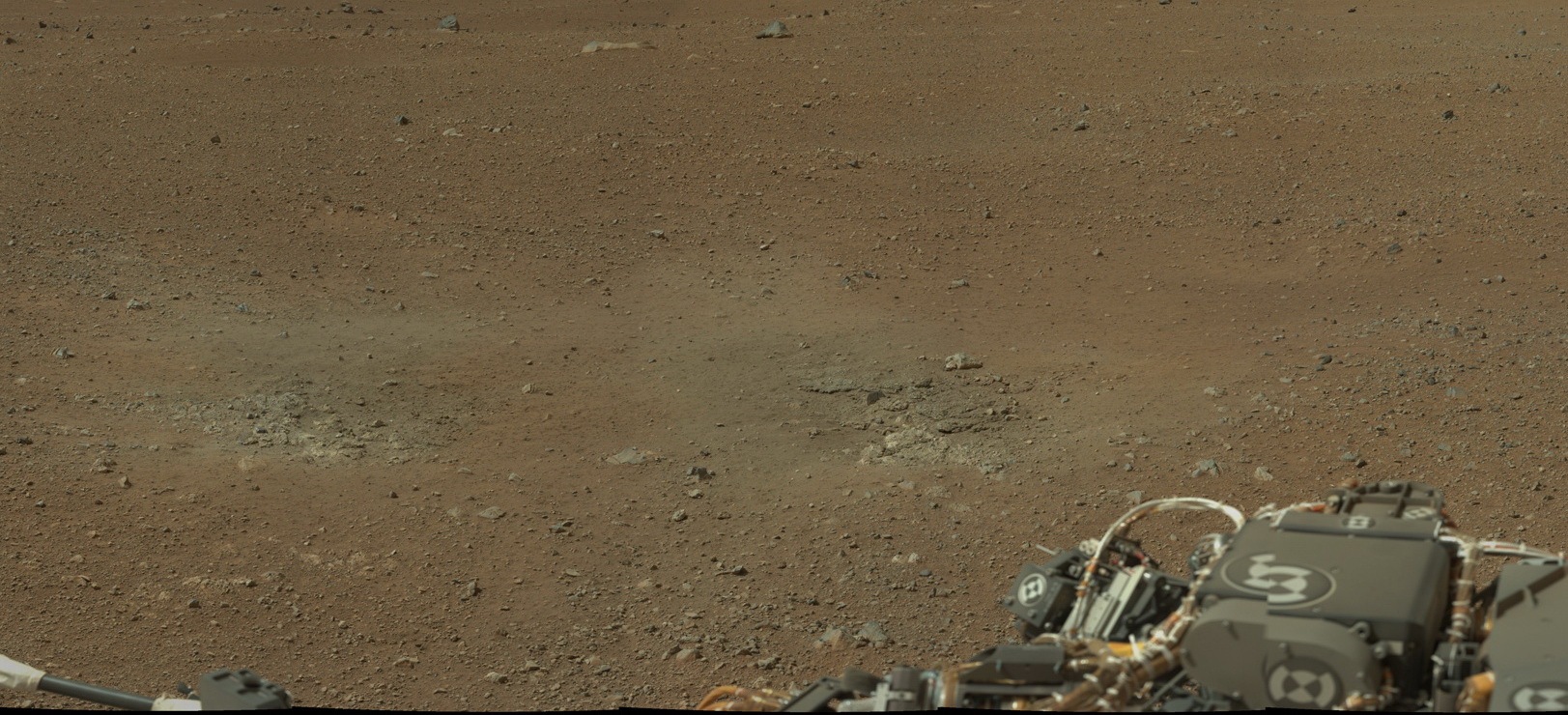
Не обошлось без внедрения комплексных решений и в программной части Curiosity: на каждом этапе работы марсохода предусматривается полное обновление ПО в соответствии с текущими задачами. К примеру, во время полета и первых нескольких дней на Красной планете, марсоход использовал программы, «заточенные» именно под посадку и развертывание, с наименьшим присутствием софта, который отвечает за перемещение по поверхности. В течение первых выходных на Марсе оба основных компьютера MSL получили загруженное еще во время перелета обновление ПО, которое отныне максимально настроено для решения научных задач. В частности, без участия инженеров с Земли марсоход сможет во время движения идентифицировать препятствия и выбирать оптимальные пути их преодоления с коррекцией всего маршрута. Также был установлен другой важный набор обновлений, предназначенных для полнофункционального использования роботизированной руки-манипулятора.
В течение ближайших нескольких недель будет принято решение о том, куда отправить ровер по окончании периода проверки и настройки оборудования. Для этого специалисты изучают переданные марсоходом снимки окрестностей.

Не обошлось без внедрения комплексных решений и в программной части Curiosity: на каждом этапе работы марсохода предусматривается полное обновление ПО в соответствии с текущими задачами. К примеру, во время полета и первых нескольких дней на Красной планете, марсоход использовал программы, «заточенные» именно под посадку и развертывание, с наименьшим присутствием софта, который отвечает за перемещение по поверхности. В течение первых выходных на Марсе оба основных компьютера MSL получили загруженное еще во время перелета обновление ПО, которое отныне максимально настроено для решения научных задач. В частности, без участия инженеров с Земли марсоход сможет во время движения идентифицировать препятствия и выбирать оптимальные пути их преодоления с коррекцией всего маршрута. Также был установлен другой важный набор обновлений, предназначенных для полнофункционального использования роботизированной руки-манипулятора.
В течение ближайших нескольких недель будет принято решение о том, куда отправить ровер по окончании периода проверки и настройки оборудования. Для этого специалисты изучают переданные марсоходом снимки окрестностей.