Создана универсальная роботизированная рука
Американские инженеры создали манипулятор для роботов, в котором объединены две часто применяемые конструкции: пальцы и липкие поверхности, аналогичные лапке геккона.

Это позволяет манипулятору хватать предметы разных форм и размеров, в том числе и те, которые в несколько раз больше самого устройства - в тестах он смог удержать пластиковое ведро и куриное яйцо. Статья с описанием разработки опубликована в Science Robotics.
Гекконы известны своей способностью лазать по деревьям и стенам, не падая, обусловленной строением их лап. Они состоят из пластинок и крючков, которые плотно прилегают к поверхности, из-за чего между ними возникает сила Ван-дер-Ваальса. Суммарная сила прилипания гекконов к поверхности на несколько порядков превышает их собственный вес, однако они могут с легкостью поднимать лапы, меняя угол наклона волосков. Кстати, огромную разницу между силой прилипания и весом ученым удалось объяснить лишь несколько лет назад: оказалось, что этот запас нужен для динамических нагрузках, и при приземлении после прыжка сцепления едва хватает, чтобы животное не упало.
Инженеры давно научились создавать искусственные аналоги лапки геккона с похожей конструкцией и свойствами, но чаще всего они применяются в самых простых захватах. Уилсон Рутоло (Wilson Ruotolo) с коллегами из Стенфордского университета разработал более универсальный захват с пальцами, на поверхности которых есть площадки с конструкцией лапки геккона из микропластинок, расположенных под углом. Ранее похожую конструкцию разработали и испытали для своих нужд в NASA.
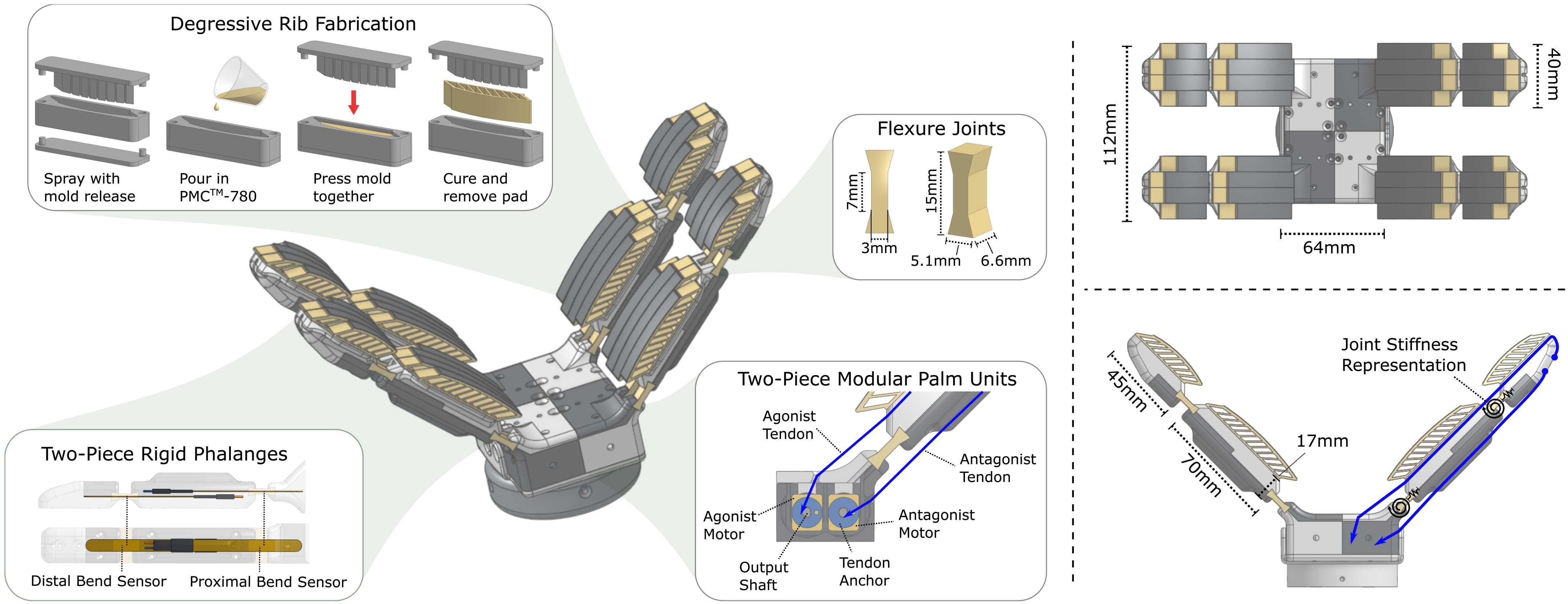
Конструкция манипулятора
В новом устройстве пальцы двигаются независимо друг от друга, что дает большую адаптируемость к форме и размеру предметов. Каждый палец приводится в движение двумя тросами и моторами, отвечающими за сгибание и разгибание соответственно. Важное улучшение конструкции заключается в том, что между корпусом пальца и липучими поверхностями расположен массив из полимерных ребер. Их функция заключается в том, что при контакте пальца с предметом они создают сдвиговое напряжение, увеличивающее адгезивные свойства липучей поверхности.

Испытания робоманипулятора показали, что он споособен удерживать объекты разной формы и жесткости: от куриного яйца, которое в несколько раз меньше по размеру, до пластикового ведра, которое, наоборот, в несколько раз больше, чем манипулятор.
Автор: Григорий Копиев
Ссылка на источник
Это позволяет манипулятору хватать предметы разных форм и размеров, в том числе и те, которые в несколько раз больше самого устройства - в тестах он смог удержать пластиковое ведро и куриное яйцо. Статья с описанием разработки опубликована в Science Robotics.
Гекконы известны своей способностью лазать по деревьям и стенам, не падая, обусловленной строением их лап. Они состоят из пластинок и крючков, которые плотно прилегают к поверхности, из-за чего между ними возникает сила Ван-дер-Ваальса. Суммарная сила прилипания гекконов к поверхности на несколько порядков превышает их собственный вес, однако они могут с легкостью поднимать лапы, меняя угол наклона волосков. Кстати, огромную разницу между силой прилипания и весом ученым удалось объяснить лишь несколько лет назад: оказалось, что этот запас нужен для динамических нагрузках, и при приземлении после прыжка сцепления едва хватает, чтобы животное не упало.
Инженеры давно научились создавать искусственные аналоги лапки геккона с похожей конструкцией и свойствами, но чаще всего они применяются в самых простых захватах. Уилсон Рутоло (Wilson Ruotolo) с коллегами из Стенфордского университета разработал более универсальный захват с пальцами, на поверхности которых есть площадки с конструкцией лапки геккона из микропластинок, расположенных под углом. Ранее похожую конструкцию разработали и испытали для своих нужд в NASA.
Конструкция манипулятора
В новом устройстве пальцы двигаются независимо друг от друга, что дает большую адаптируемость к форме и размеру предметов. Каждый палец приводится в движение двумя тросами и моторами, отвечающими за сгибание и разгибание соответственно. Важное улучшение конструкции заключается в том, что между корпусом пальца и липучими поверхностями расположен массив из полимерных ребер. Их функция заключается в том, что при контакте пальца с предметом они создают сдвиговое напряжение, увеличивающее адгезивные свойства липучей поверхности.
Испытания робоманипулятора показали, что он споособен удерживать объекты разной формы и жесткости: от куриного яйца, которое в несколько раз меньше по размеру, до пластикового ведра, которое, наоборот, в несколько раз больше, чем манипулятор.
Автор: Григорий Копиев
Ссылка на источник